ROBOGUIDE软件除了能够使用虚拟示教器、离线编程工具示教编程以外,还可以利用目标点自动生成机器人运动程序。
目标点是仿真人员在ROBOGUIDE软件中根据机器人运行轨迹规划,在空间或物体表面手动创建的带有机器人位置与姿态的数据点,它与使用虚拟示教器示教的程序点非常类似。
与程序点不同的是,目标点的点位数据支持多台机器人共享,而示教点只能机器人自身单独使用。如果有多台机器人运动时需要经过一系列相同的点位,那么这时候就可以把这些相同的点位先用目标点示教。在生成机器人程序时,只需要每台机器人根据自己需要的点位选择对应的目标点即可,这就是目标点点位数据共享。
目标点添加在ROBOGUIDE软件中创建一个简易机器人工作站,包含1台FANUC机器人、1个简易工装、1个工件和1个机器人末端工具。
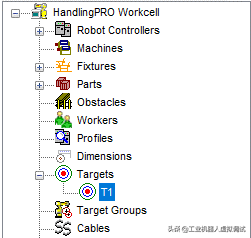
同时,软件左侧的CellBrowser对话框里的Targets下出现“T1”目标点文件名称。
在表面移动:当鼠标在对象表面移动时,将直接显示表面的法线。
在边缘移动:当鼠标在对象边缘移动时,边缘上会出现沿着边缘走向的白色线段,法线也会显示在边缘上。
在顶点上移动:当鼠标在对象顶点附近移动时,顶点处会出现白色的直角坐标系。
按住“Shift+Alt”键在圆弧上移动:当按住“Shift+Alt”键,鼠标在圆弧(孔)上移动时,在圆弧的圆心位置处会显示出一个“十”字。
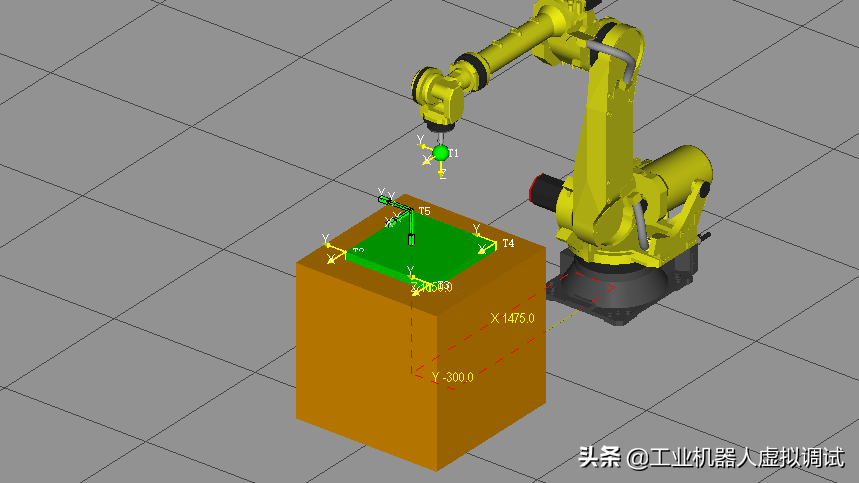
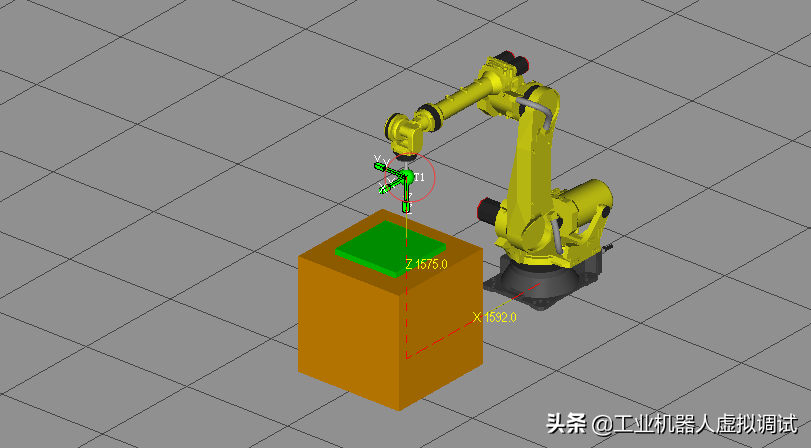
使用“Surface”命令在工件四个对角点创建目标点时,要注意:法线一定要与工件上表面垂直,这样创建出的目标点坐标系姿态才会与机器人TCP坐标系姿态保持一致。
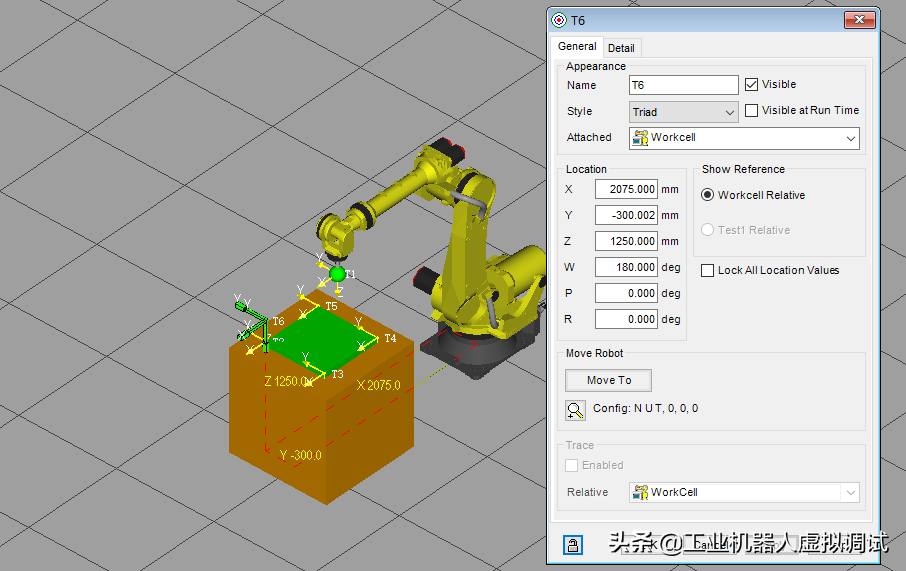
接近目标点创建完成后,在左侧CellBrowser对话框的Targets下双击“T6”,在弹出的目标点属性对话框中Location功能区下,将X坐标值与Y坐标值更改为与“T2”目标点一致,以确保T6目标点在T2目标点的正上方。
ROBOGUIDE软件中创建的目标点,只有在目标组中才能自动生成机器人程序。因此,在添加了目标点之后,还需要创建目标组,并将目标点移动到目标组中。
左侧CellBrowser对话框的TargetGroups下出现创建的目标组,关闭Targets对话框。
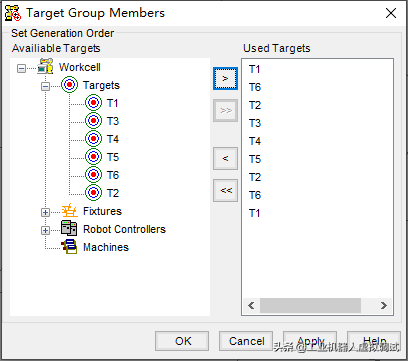
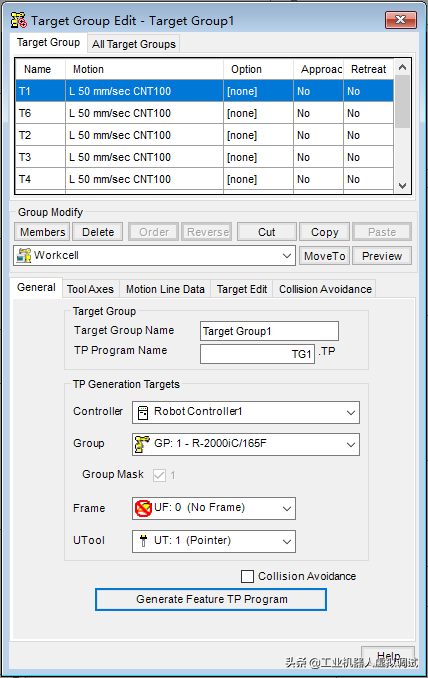
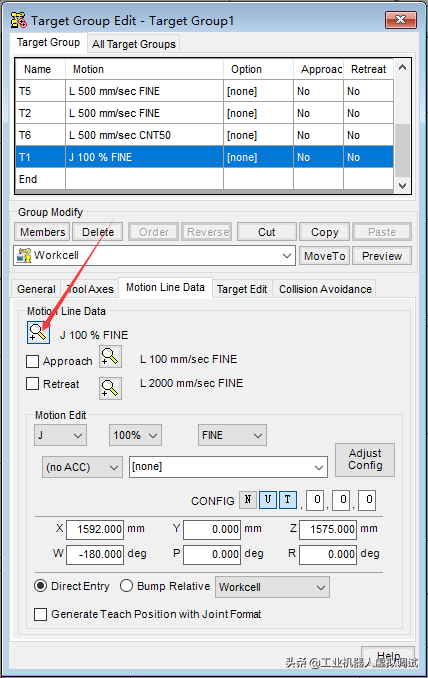
右击新创建的目标组,在快捷菜单中选择“EditTargetGroup”,弹出TargetGroupEdit对话框。
此时,在TargetGroupEdit对话框的上方出现添加的目标点,每一个目标点的后方都有自动生成的机器人运动程序。
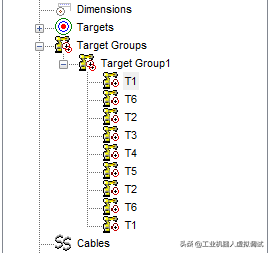
左侧CellBrowser对话框的TargetGroups下也同样出现添加的目标点文件,并且目标点的顺序与在TargetGroupMembers对话框中设定的保持一致。
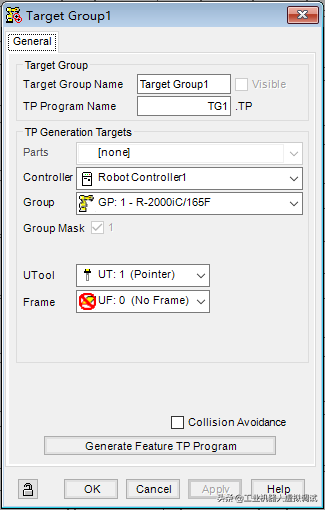
也可以先关闭TargetGroupEdit对话框,然后在左侧CellBrowser对话框的TargetGroups下,右击目标组“TargetGroup1”,在弹出的快捷菜单中选择“GenerateTPProgram”,同样能够根据选定的目标点自动生成机器人运动程序。
程序生成后,程序文件将会在左侧CellBrowser对话框的机器人程序Programs下显示,本例的程序名称为“TG1”。

同时,软件工作区也会出现以目标点为参考生成的机器人路径轨迹线与运动指令参数。
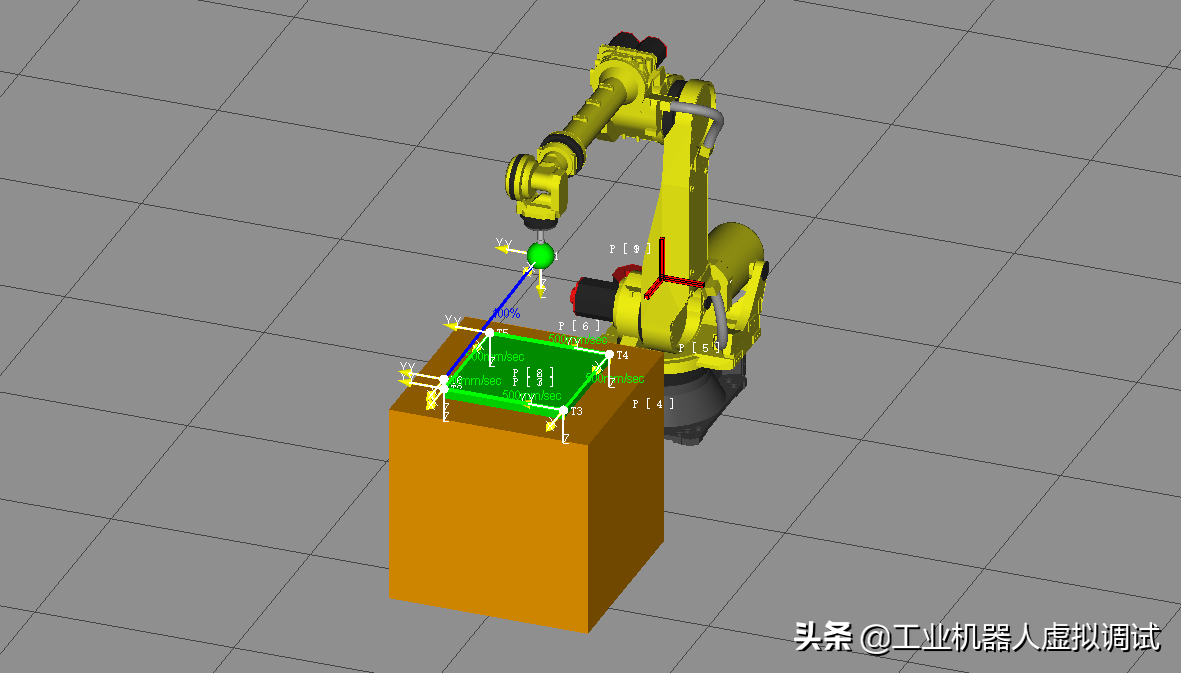
对机器人仿真运行,运行效果如下方动态图所示,可以看到机器人能够按照利用目标点自动生成的程序顺利运行。
The
上一篇:FANUC机器人KAREL语言编程:“Hello,world”用户信息输出
公寓月租50万,让中国市场情何以堪")


