控制模式
外部脉冲位置控制PTI
SINAMICSV90集成外部脉冲位置控制功能
(PulseTrainInputpositioncontrol)
功能:
双通道脉冲输入
脉冲+方向,AB相脉冲输入方式
电子齿轮比设定
脉冲位置控制特点:
机械的移动量与指令脉冲的总数成正比;
机械的速度与指令脉冲串的速度(脉冲频率)成正比;
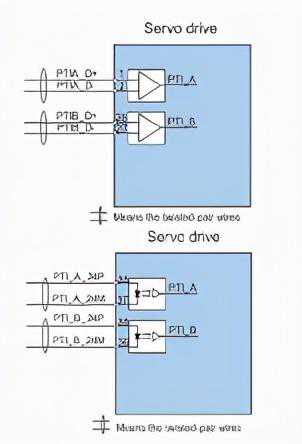
V90支持24V单端脉冲信号和5V高速差分脉冲信号
P29014=0,5V高速差分脉冲输入(RS485)有效
最大脉冲频率为1MHz
优点:传输距离更长,不易受干扰
P29014=1,24V单端脉冲输入(光电隔离)有效
最大脉冲频率为200kHz
优点:上位机成本较低
缺点:传输距离有限,容易受干扰
P29010脉冲输入形式
内部位置控制
SINAMICSV90不仅支持通过上位机给定脉冲形式的位置控制,还支持伺服驱动器内部预先设定的位置目标形式的定位控制,最多可支持8个定位目标
内部位置设定
数字量输入端子
POS3
POS2
POS1
内部位置1
0
0
0
内部位置2
0
0
1
内部位置3
0
1
0
内部位置4
0
1
1
内部位置5
1
0
0
内部位置6
1
0
1
内部位置7
1
1
0
内部位置8
1
1
1
IPOS
8个位置值设定
位置,速度,加速度,减速度
定位模式选择
绝对位置/相对位置
配置线性轴/模态轴
反向间隙补偿
回参考点
软限位
速度限幅/转矩限幅
速度控制S(V90PTI)
总共有八个原用于速度设定值
可通过数字量输入信号组合SPD1,SPD2,SPD3选择其一:
数字量输入
内部速度给定
模拟量给定
CCWE
CWE
正电压
负电压
停止
0
0
停止
停止
停止
停止
0
1
正逻辑
正逻辑
负逻辑
停止
1
0
负逻辑
负逻辑
正逻辑
停止
1
1
停止
停止
停止
停止
可以使用数字量输入信号控制电机旋转方向和的运行/停止
——CWE:顺时针方向使能
——CCWE:逆时针方向使能
转矩控制T(V90PTI)
可通过外部模拟量输入A12和内部扭矩设定值进行转矩给定
速度限制
全局速度限制
内部及外部速度限制
SLM2SLM1组合,其中01状态下外部速度限制,即模拟信号源A11限制。
复合控制模式(V90PTI)
SINAMICSV990伺服驱动支持9种控制模式,包括4种基
本控制模式和5种复合控制模式。基本控制模式只能支
持单一的控制功能,复合控制模式包含两种基本控制
功能,可以通过DI信号在两种基本控制功能间切换
控制模式
基本控制模式
位置控制
外部脉冲控制模式(PTI)
内部设定值控制模式(IPos)
速度控制模式(s)
扭矩控制模式(T)
复合控制模式控制
控制更改模式:PTI/S
控制更改模式:IPos/S
控制更改模式:PTI/T
控制更改模式:IPos/T
控制更改模式:S/T
数字量输入D110的功能被固定为控制模式选择(C-MODE)

V90PN通讯体系
I/O监视器I/O控制器I/O设备
SINAMICSV90PN支持
PROFINETIRT通讯,和DSC动态伺服控制
最短通讯循环周期为2ms
S7-1200目前只支持RT通信(通用运动控制)
S7-1500支持IRT通信(高动态响应运动控制)
RT:实时通讯等时同步不高5ms-10ms
IRT:等时同步通讯
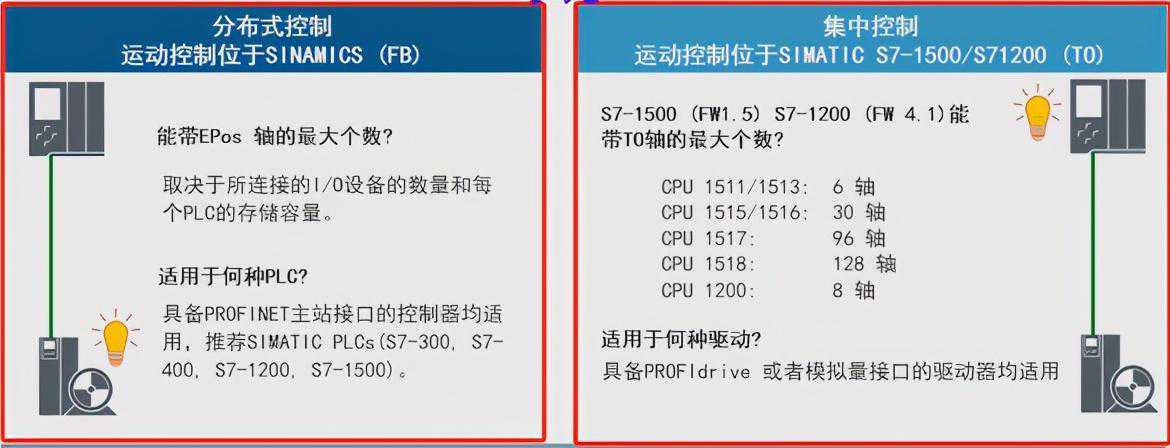
SIMATICS7-1200/S7-1500的集中运动控制
S7-1500均有工艺对象
工艺对象中包含速度轴位置轴和同步轴
工艺对象完全接管了与驱动器之间的通讯(PROFIdrive)·通过PROFINET或者PROFBUS,或者模拟量连)
无需额外的通讯编程
系统集成了诊断功能,系统会自动生成报警信息并显示在PLC的webserver中,也可以同时显示在STP7,HMI和PLC的显示上无需额外的代码
无需额外的代码即可通过HMI复位驱动报警
动控制的程通过PLC-Open块实现
S7-1200均有工艺对象
PTO(Puls-Train-Output)
固件版本FW41的位置轴可通过PROFIdrive
定位控制位于SINAMICS内部
速度轴控制是SINAMICS都备的基本功能
集成的运动控制功能可通过电机器实现相对或绝对的位置控制(线性轴或模态轴SINAMICSV99O的EPos功能)
低PLC负载率,因为运动控制功能位于驱动器侧
能够支持更多的轴数
统一的标准功能块可用于与驱动器的通讯连接(PROFIdrive通过PROFINET)
形象的功能块接口使得SINAMICS集成的运动控制功能的组态简单直观
得益于集成的监控功能和补偿功能,具有更高的易用性和可靠性
V90PN通讯报文
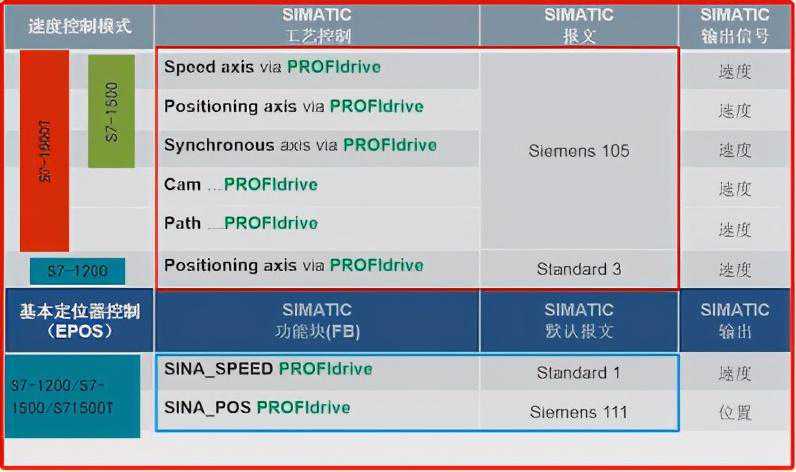
基本定位器(EPOS)FB块
SINA_POS——FB284111报文(位置)
SINA_SPEED——FB2851报文(速度)
运动控制的对比