
描述:在自动控制系统中经常用到几种控制模式分别是位置控制模式、速度控制模式、转矩控制模式、全闭环控制模式。但是比较常用的控制模式还是位置控制模式,说到位置控制模式那么我们就想到了定位控制指令,下面分别对这几个指令讲解一遍。
定位指令
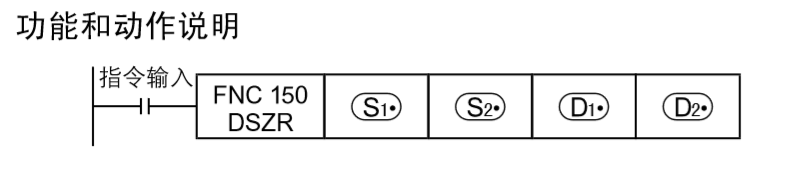
一、DSZR/带DOG搜索的原点回归
概要:执行原点回归,使机械位置与可编程控制器内的当前值寄存器一致的指令。
DOG搜索功能的对应
允许使用近点DOG和零点信号的原点回归,但是不可以对零点信号计数后决定原点。
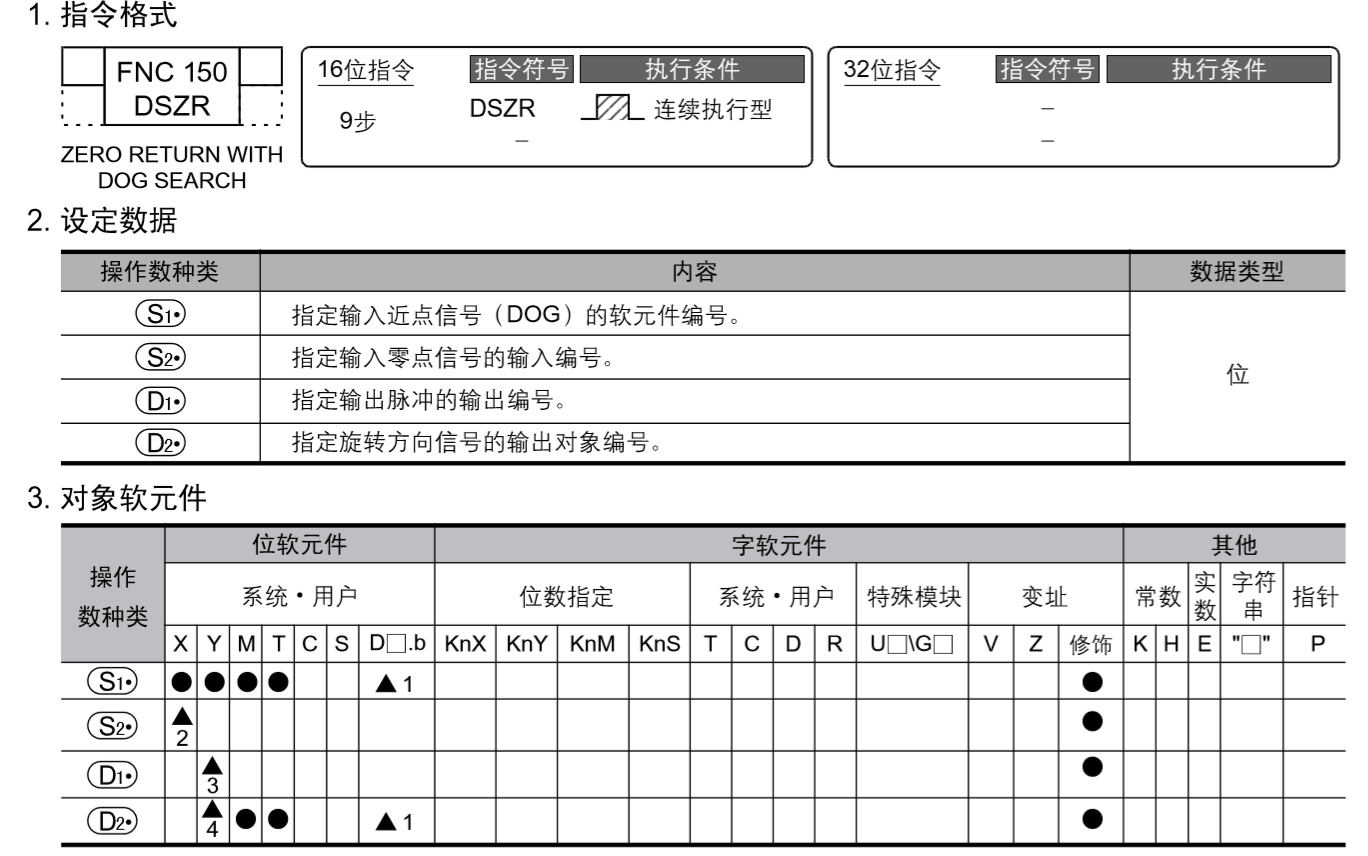
二、ZRN/原点回归
概要:执行原点回归使机械位置与可编程控制器内的当前寄存器一致的指令
该指令是PLC与伺服驱动器配合工作时,用指定脉冲速度和脉冲输出端口,让执行机构向动作原点(DOG)移动,直到遇到原点信号满足条件为止。

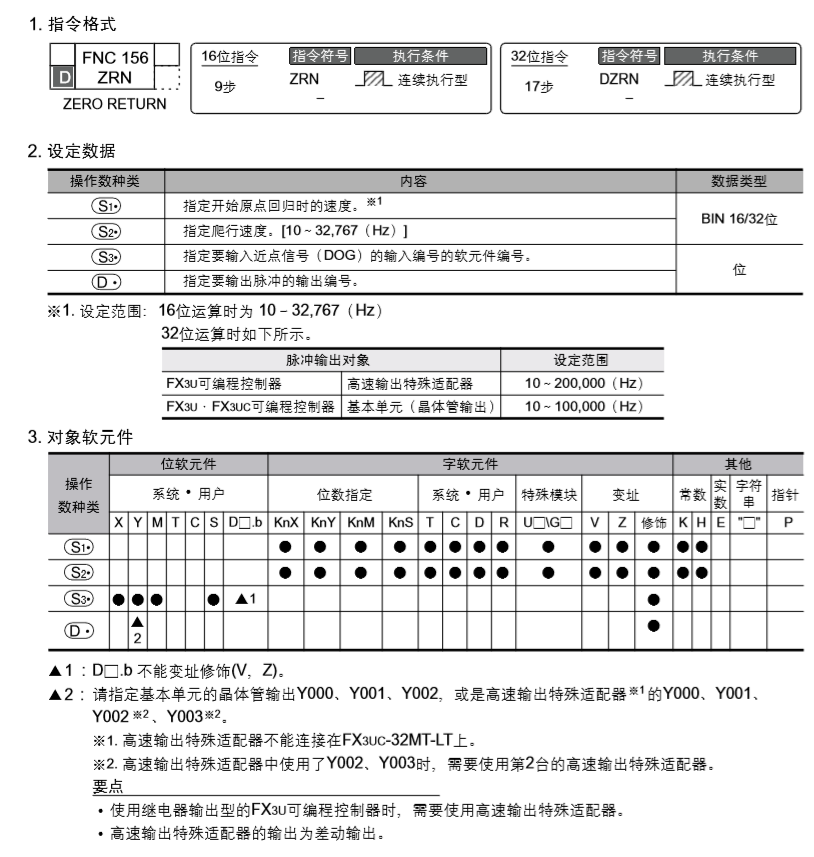
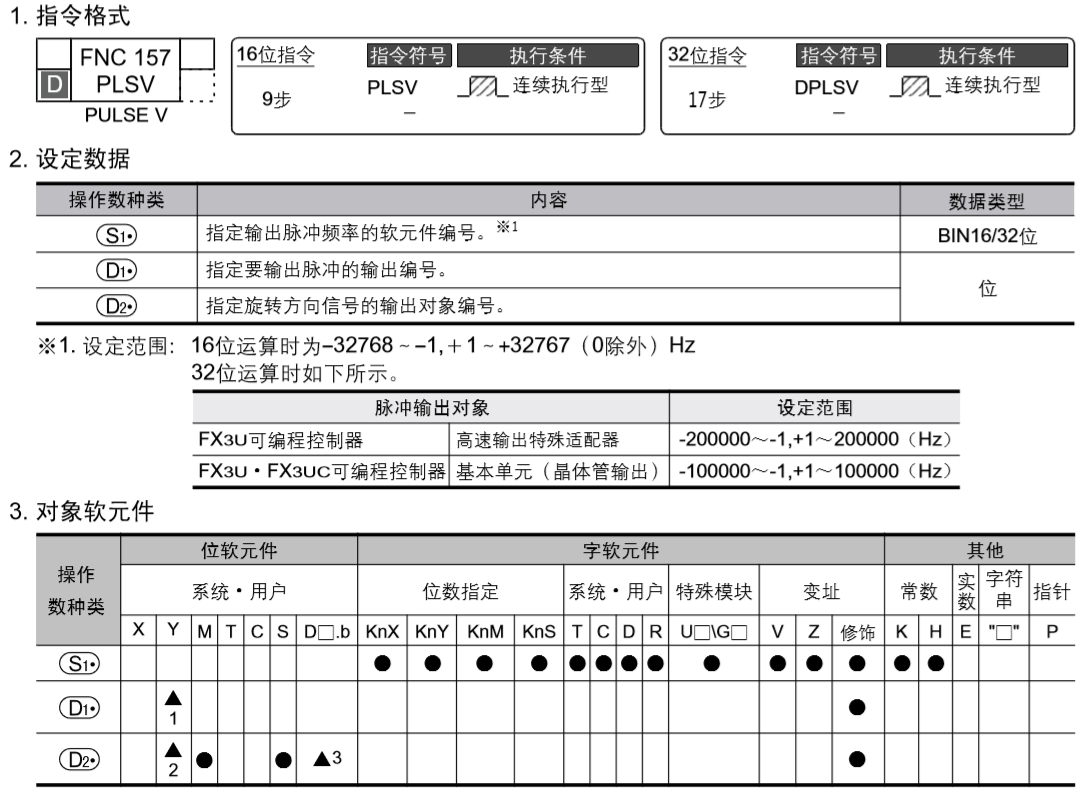
三、PLSV/可变速脉冲输
概要:输出带旋转方向的可变速的脉冲指令

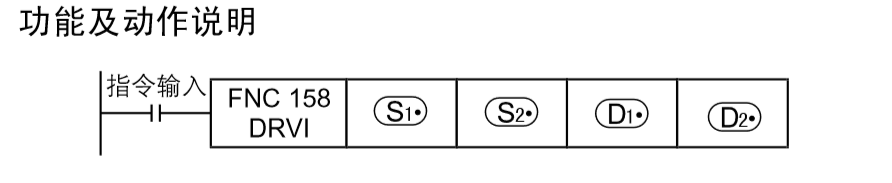
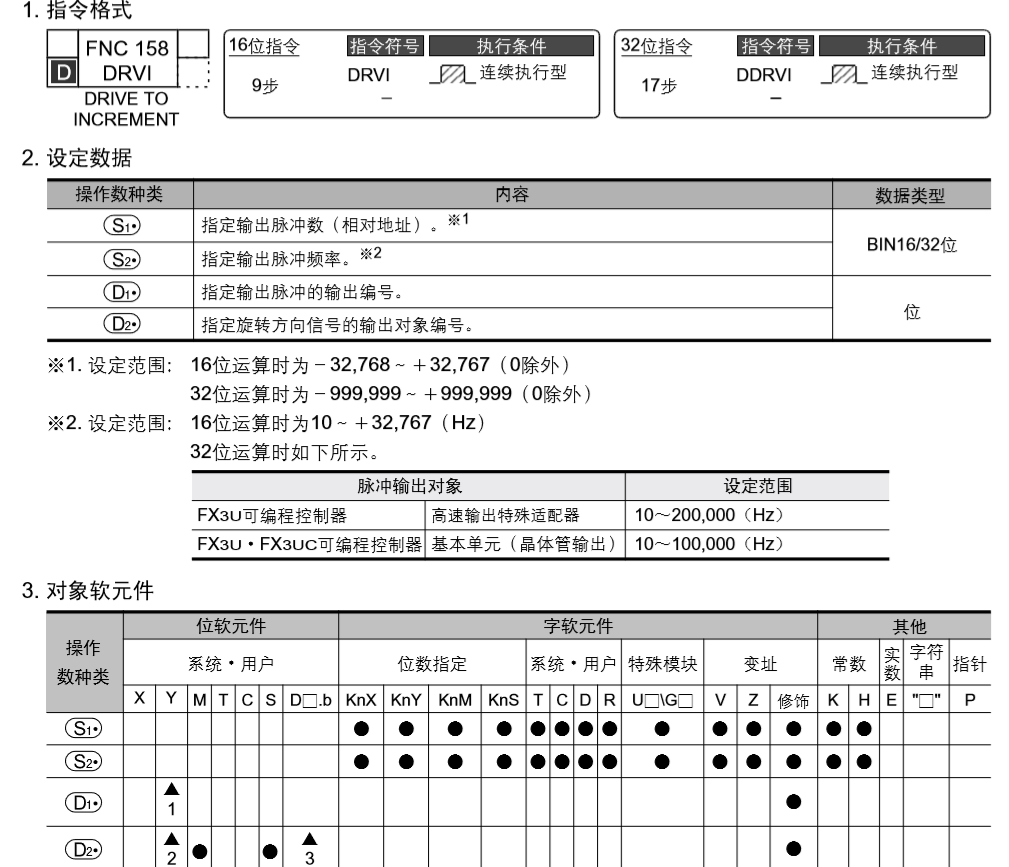
四、DRVI/相对定位
概要:以相对驱动方式执行单速定位的指令,用带正/负的符号指定从当前位置开始的移动距离的方式,也称为增量(相对)驱动方式
只有晶体管输出PLC才能使用该指令。
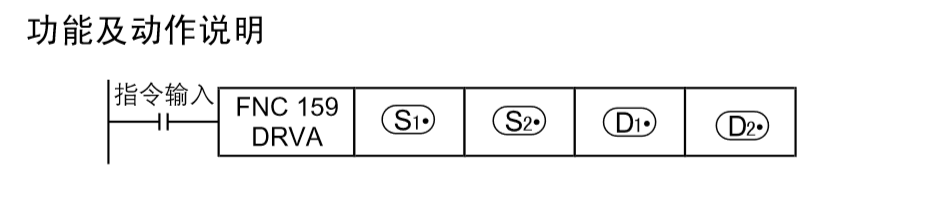
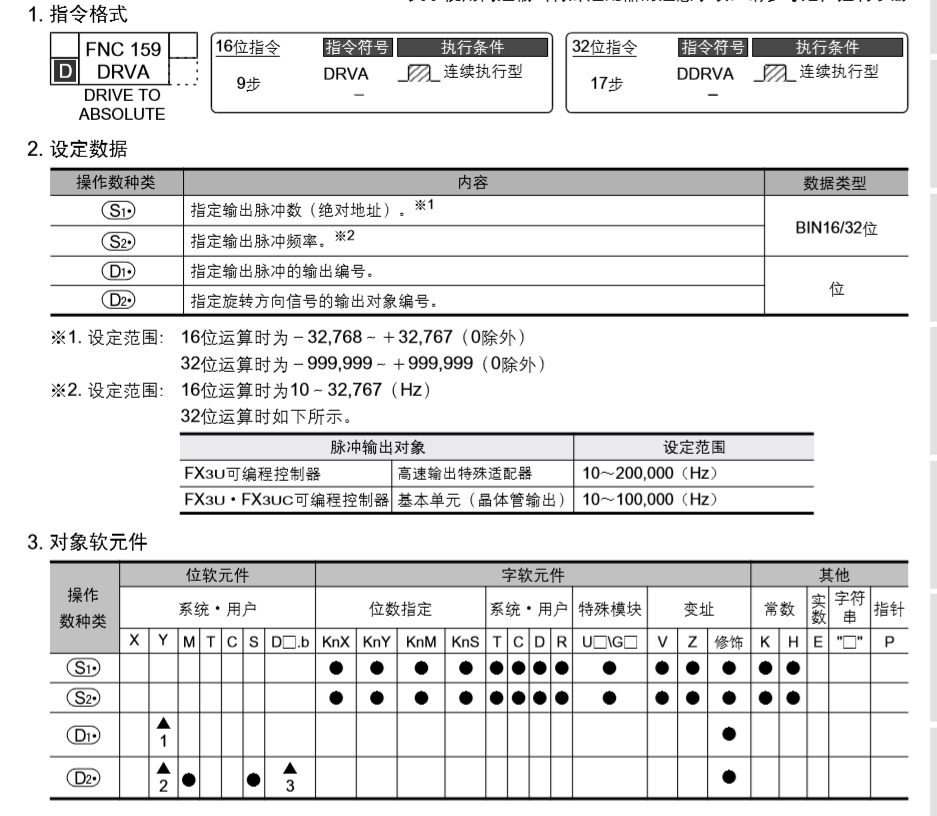
五、DRVA/绝对定位
概要:以绝对驱动方式执行单速定位的指令。该指令是按指定的端口、频率和运行方向输出脉冲,令伺服执行机构运动到指定目的点。只有晶体管输出PLC才能使用该指令。

")

