
伺服电机
在进行电机控制处理的过程中,一般都会需要使用到电机控制各种模式,如绝对定位、相对定位、点动运行、回原点运行等。在PLC的内部,其实际上除了这几种功能外,还具有多个功能指令。如下图表所示:
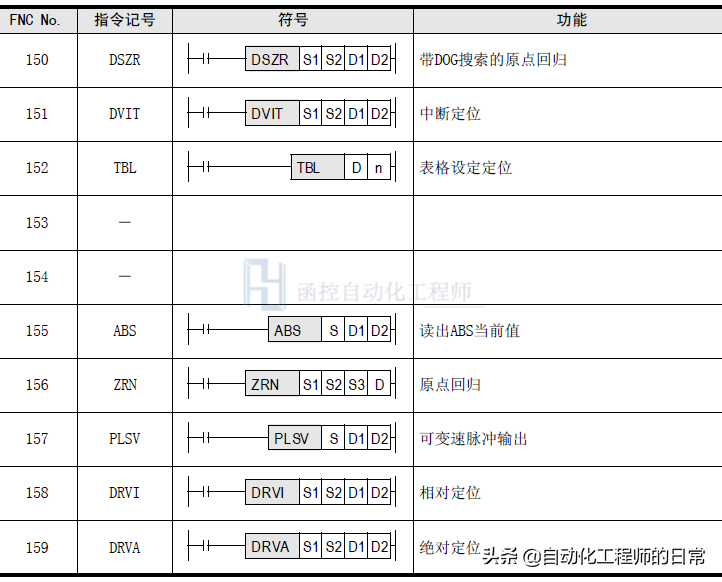
这其中,DSZR、PLSV、DRVA、DVIT这几个指令是常用且必要的指令。
原点回归(DSZR)
执行原点回归使机械位置与可编程控制器内的当前值寄存器一致的指令。用于建立其运动轴的参考位置。如进行绝对定位100mm,其中定位运行的0位置,就是原点回归所确定的参考位置。

原点回归指令使用示例
S1:指定输入近点信号(DOG)的软元件编号。
S2:指定输入零点信号的输入编号。
D1:指定输出脉冲的输出编号。
D2:指定旋转方向信号的输出对象编号。
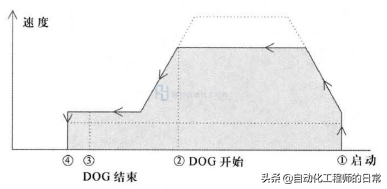
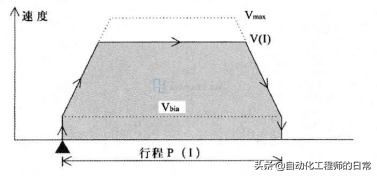
回原点曲线
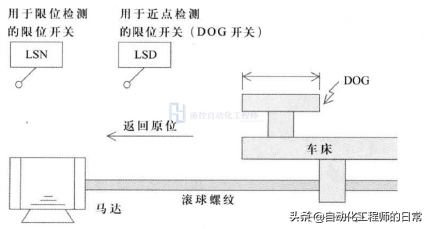
回原点设备动作
可变速脉冲输出(PLSV)
输出带旋转方向的可变速脉冲的指令。

脉冲输出使用示例
S1:指定输出脉冲频率的软元件编号。
D1:指定输出脉冲的输出编号。
D2:指定旋转方向信号的输出对象编号。
相对定位(DRVI)
以相对驱动方式执行单速定位的指令。用带正/负的符号指定从当前位置开始的移动距离的方式,也称为增量(相对)驱动方式。

相对定位指令使用示例
S1:指定输出脉冲数(相对地址)。
S2:指定输出脉冲频率。
D1:指定输出脉冲的输出编号。
D2:指定旋转方向信号的输出对象编号。
中断定位(DVIT)
执行单速中断定长进给的指令。

中断定位指令使用示例
S1:指定中断后的输出脉冲数(相对地址)。
S2:指定输出脉冲频率。
D1:指定输出脉冲的输出编号。
D2:指定旋转方向信号的输出对象编号。
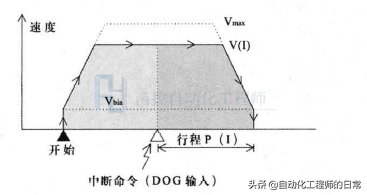
定位中断
绝对定位(DRVA)
以绝对驱动方式执行单速定位的指令。用指定从原点(零点)开始的移动距离的方式,也称为绝对驱动方式。

绝对定位指令使用示例
S1:指定输出脉冲数(绝对地址)。
S2:指定输出脉冲频率。
D1:指定输出脉冲的输出编号。
D2:指定旋转方向信号的输出对象编号。
绝对定位运行曲线



