硬件:PLC-FX2N/FX2N-485-BD通信板/FX2N-4AD/FX2N-4DA/三菱变频器/鼠笼式电机/增量式编码器/电机制动器
软件:GxWorks2/组态王6.55程序:PLC程序/上位机程序
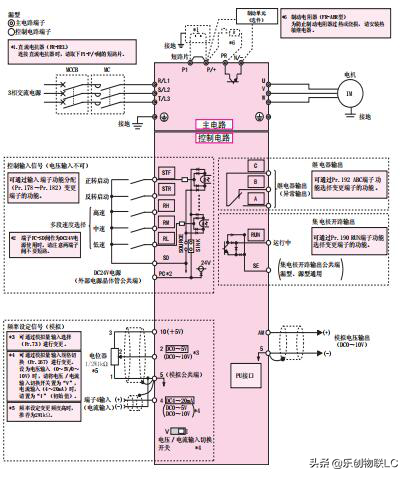
1.三菱变频器介绍
1)电气原理图
2.鼠笼式电机
转子绕组不是由绝缘导线绕制而成,而是铝条或铜条与短路环焊接而成或铸造而成的三相异步电动机称为鼠笼式电机。鼠笼型电动机是三相异步电动机中的一种,三相异步电动机分为做鼠笼型电动机和绕线式电动机。
3.编码器
1)编码器简介
编码器是一个机械与电子紧密结合的精密测量器件,将信号或数据进行编码、转换,用以通讯、传输和存储的信号数据。按照不同的特征,编码器分类情况如下:
码盘和码尺。直线位移转换成电信号的编码器称为码尺,角位移转换成电信的为码盘。
增量型编码器。提供位置、角度和圈数等信息,以每圈脉冲数定义分别率。
绝对值型编码器。以角度增量的方式提供位置、角度和圈数等信息,每个角度增量赋予唯一的编码。
混合式绝对值编码器。混合式绝对值编码器输出两组信息:一组信息用于检测磁极位置,带有绝对信息功能;另一组则完全同增量式编码器的输出信息。
2)增量式编码器
增量式编码器将位移转换成周期性电信号,电信号再转变成计数脉冲,脉冲的个数表示位移的大小;直接利用光电转换原理输出三组方波脉冲A、B和Z相。A、B两组脉冲相位差90o,可方便地判断出旋转方向;Z相每转一个脉冲,用于基准点定位。其优点:原理构造简单,机械平均寿命可在几万小时以上,抗干扰能力强,可靠性高,适合于长距离传输。缺点:无法输出轴转动的绝对位置信息。
3)测速原理
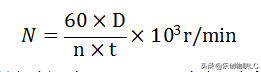
n为码盘上一周小孔的个数,测量时间为tms,tms内得到脉冲的个数D,转速N。
SPD速度检测指令
[]
S1.计数脉冲输入口地址,X0~X5
S2.测量计数脉冲规定数据或者其存储字元件,单位ms
时间内测量计数脉冲数的存储首址,占用3点
4)程序

4.FX2N-4DA
三菱FX2N-4DA是一款模拟量模块。首先给大家介绍一下模拟量模块的工作原理。模拟量模块是将速度、压力、液位、温度等信号转化为1-5V,4-20mA(也有别的信号的,如0-10V,0-5V等)然后交给PLC进行处理的。PLC是不知道具体电压或者电流信号的大小的。所以,我们要用一个数字来表示它的大小,然后告诉PLC,PLC才能知道输入的电压、电流信号具体有多大。
输出电压输出电流模拟量输出范围:DC-10至10V;外部负载电阻2千欧到1兆欧:0至20mA;
5.FX2N-4AD
FX2N-4AD模拟特殊模块有四个输入通道。输入通道接收模拟信号并将其转换成数字量,这称为A/D转换。FX2N-4AD最大分辨率是12位。
基于电压或电流的输入/输出的选择通过用户配线来完成,可选用的模拟值范围是-10V到10VDC(分辨率5mV),并且/或者4到20mA,-20到20mA(分辨率:20μA).
FX2N-4AD和FX2N主单元之间通过缓冲存储器交换数据,FX2N-4AD共有32个缓冲存储器(每个16位).
FX2N-4AD占用FX2N扩展总路线的8个点.这8点可以分配成输入或输出.FX2N-4AD消耗FX2N主单元成有源扩展单元5V电源糟30mA的电流。
6.特殊功能模块指令
1)特殊功能模块指令读指令FROM
[]
m1特殊模块位置编号,m1=0~7
m2读出数据的特殊模块缓存存储器BFM首址,m2=0~32767
DBFM数据传送到PLC的存储字元件首址
n传送数据个数,n=1~32767
例如FROMK1K30D0K1
把130单元内容复制到D0单元中。
1)特殊功能模块指令写指令TO
[]
m1特殊模块位置编号,m1=0~7
m2要写入数据的特殊模块缓存存储器BFM首址,m2=0~32767
S写入到BFM数据的字元件存储首址
n传送数据个数,n=1~32767
TO指令在程序中常用脉冲执行型TOP。
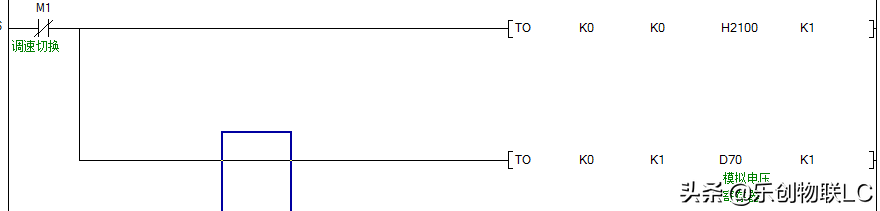
TOK0K0H2100K1
把十六进制数H2100复制到00单元中
TOK0K1D70K1
把PLC中D70的电压写到01单元中
TO是由PLC到功能模块的数据传递,FROM是从功能模块到PLC的数据传递。
从指定的模拟输入模块读人数据前应先将设定值写入,否则按缺省设定值执行。
在BFM#0中写入十六进制4位数字HOOOO使各通道初始化。最低位数字控制通道1,最高位控制通道4,数字的意义如下:
CH1O=0:设定输入范围-10~+10V
CH2O=1:设定输入范围+4~+20:mA
CH3O=2:设定输入范围-20~+20mA
CH4O=3:关闭该通道
7.模拟电压输出设置变频器频率即转速
接线接在变频器2和5(GND)
8.PID控制系统原理框图
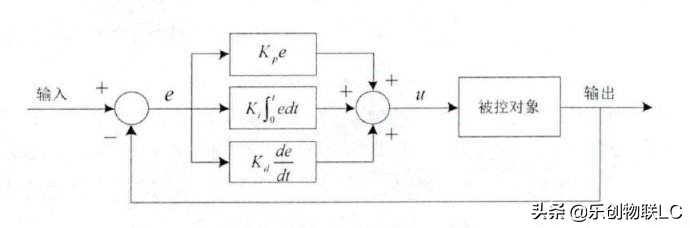
设定速度值-测量速度值=偏差值
PID控制是由偏差、偏差对时间积分和偏差对时间微分所叠加而成。分别对应比例控制,积分作用,微分作用。把三种控制规律组合在一起,并根据被控系统的特性选择合适的比例系数,积分时间和微分时间,就得到了在模拟量控制中应用最广并解决了控制的稳定性,快速性和准确性问题的无静差(偏差为0)控制-PID控制。
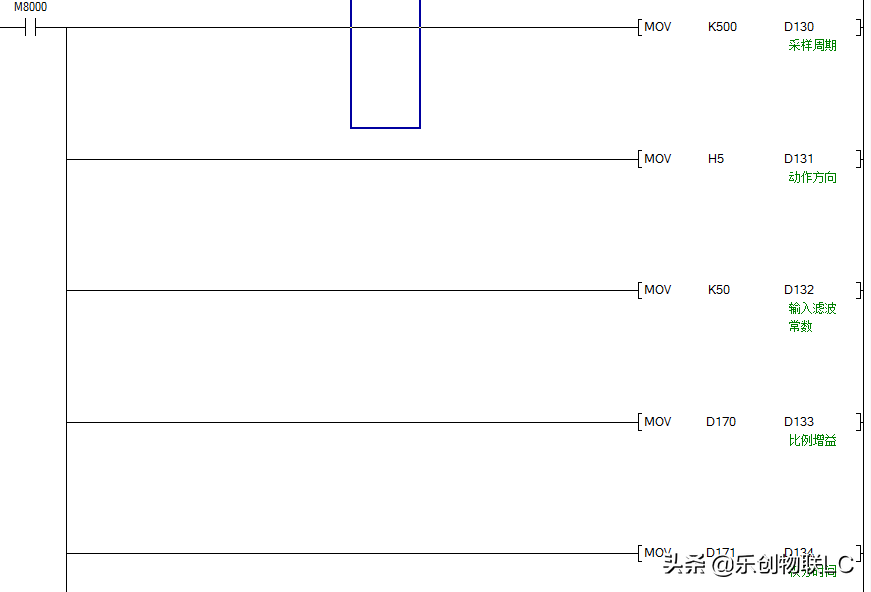
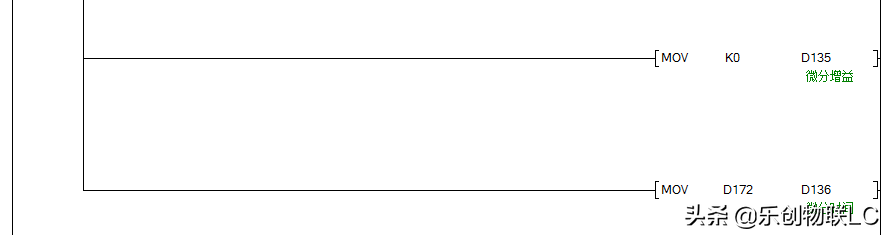
9.PID指令
[]
控制设定值SV存储字元件
控制设定值PV存储字元件
控制参数存储字元件首址
DPID控制输出MV
例

PID参数设置(可以用上位机修改测试)
通信相关,请查看上几篇文章



