V90PN的基本定位(EPOS)可用于直线轴或旋转轴的绝对及相对定位,TIAPortal中库文件DriveLib_S7_1200_1500中的SINA_POS功能块可用于在SINAMICSS/G/V系统驱动器的基本定位控制。此外,需要在调试软件V-Assistant中选择控制模式为“基本定位”,激活基本定位器。
我们之前学习过1200PLC与V90伺服的PROFINET通信组态设置,使用西门子111报文则可以使用库指令FB284对V90伺服进行编程控制,今天我们讲解FB284库指令的接口定义。
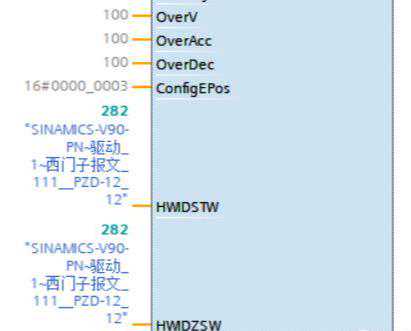
1.添加FB284库指令
在全局库中双击库指令SINA_POS(FB284)添加到程序块中,添加指令时自动生成FB284的背景数据块DB1。

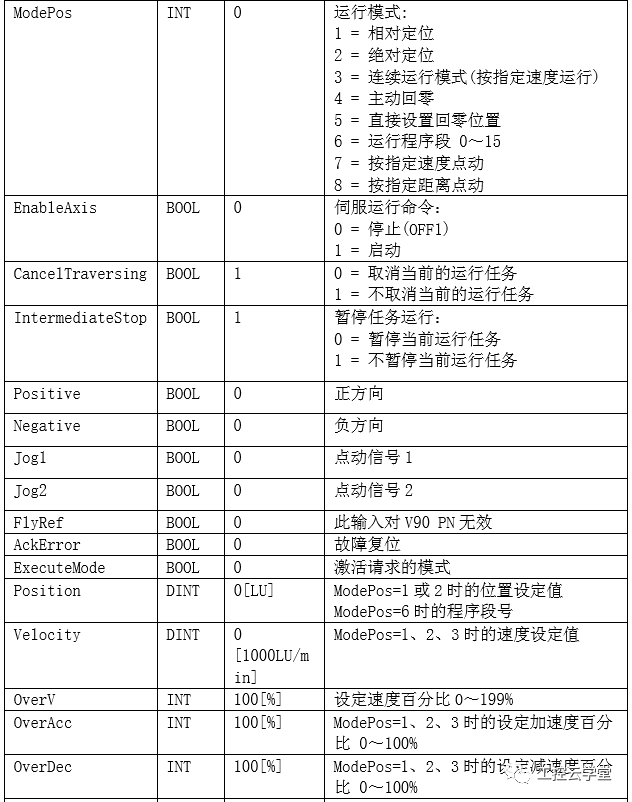
2.输入说明
ModPos可以设置为1-8,此参数用来设定伺服的运动模式
1.相对运动:设定的位置是相对当前位置移动的距离。
2.绝对运动:设定的位置值是相对原点的位置,必须先回原点才能进行绝对运动。
3.连续运行:以恒定的速度运行,中途停止则需要中断任务。
4.主动回零:主动回原点,伺服主动寻找原点且移动到原点位置。
5.设为零点:把当前位置设为原点,更改当前的伺服位置值。
6.运行程序段:设定运行的程序段0-15。程序段运行方式可以通过伺服参数设置。
7.点动1:以指定速度点动,速度可以通过伺服调试软件设置。
8.点动2:以指定距离点动,距离可以通过伺服调试软件设置。
详细说明见下列表格:
3.运行条件
1.轴通过输入EnableAxis=1使能,如果轴已准备好并驱动无故障(AxisError=0),输出AxisEnabled信号变为1。
2.ModePos输入用于运行模式的选择。可在不同的运行模式下进行切换,如:连续运行模式(ModePos=3)在运行中可以切换到绝对定位模式(ModePos=2)。
3.输入信号CancelTraversing,IntermediateStop对于除了点动之外的所有运行模式均有效,在运行时必须将其设置为1,设置说明如下:a.设置CancelTraversing=0,轴按大减速度(P2573)停止,放弃当前运行任务,轴停止后可以进行运行模式的切换。
4.设置IntermediateStop=0,使用当前设置的减速度值进行斜坡停车,当前运行任务保持,如果重新再设置IntermediateStop=1后轴会继续运行,可理解为轴的暂停。可以在轴静止后可以进行运行模式的切换。
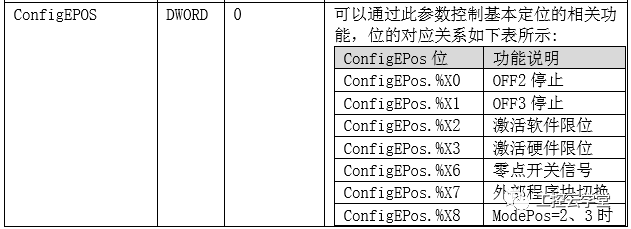
5.激活硬件限位开关,如果使用了硬件限位开关,需要将FB284功能块的输入ConfigEPos.%X3置1,激活硬件限位功能。正、负向的硬件限位开关可连接到V90PN驱动器的定义为CWL、CCWL的DI点(DI1至DI4)。
6.激活软件限位开关,如果使用了软件限位开关,需要将FB284功能块的输入ConfigEPos.%X2置1,激活软件限位功能。在驱动中设置p2580(负向软限位位置)、p2581(正向软限位位置)。
4.输出说明:
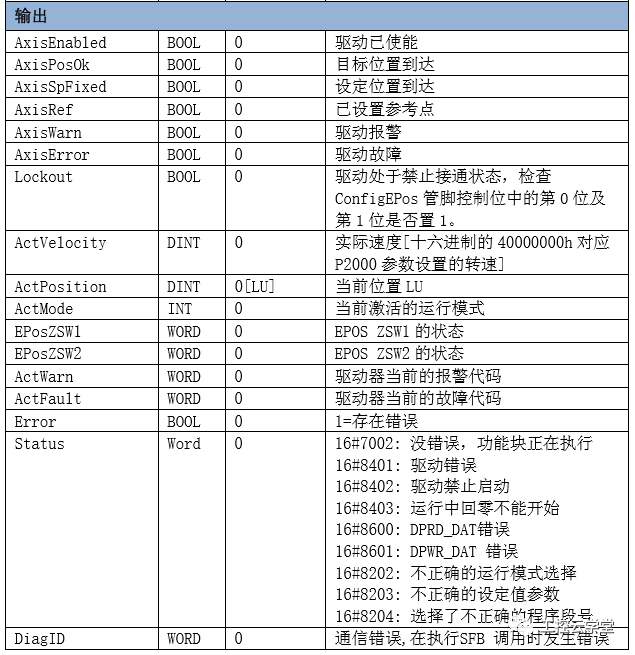
AxisPosOk:表示伺服定位完成,可以作为下一个动作的执行条件。此外,库指令输出接口还有伺服的使能,报错,位置,速度等伺服状态,可以监控伺服的运行情况。



