工业以太网一般使用中定义的以太网标准。针对自动化系统的网络节点辅助采用了服务质量(QOS)机制。PROFINET作为工业以太网之一,它采用了三种不同的方法来实现。这样既满足了普通以太网的需求,又满足了工业系统对不同应用的实时性的要求。如下图1所示。
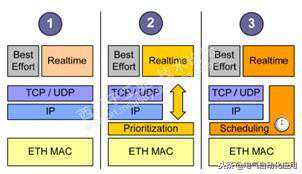
图1、PROFINET使用到的三种协议栈
①使用了以太网标准和TCP/IP,报文结构如图2所示。大多数的PROFINET通信是通过没有被修改的以太网和TCP/IP包来完成。这使得可以无限制地把办公网络的应用集成到PROFINET网络中。
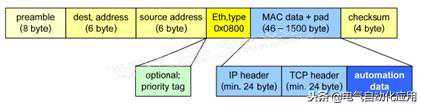
图2、TCP/IP报文结构
②RT的通信不仅使用了带有优文帧(如下图3所示),而且优化掉了OSI协议栈的3层和4层。这样大文在协议栈的处理时间,进一步提高了实时性能。由于没有TCP/IP的协议栈,所以RT的报文不能路由。

图3、PROFINETRT报文结构
③IRT通信是满足最高的实时要求,特别是针对于等时同步的应用。IRT是基于以太网的扩展协议栈,能够同步所有的通信伙伴并使用调度机制。IRT通信需要在IRT应用的网络区域内使用IRT交换机。在IRT域内也可以并行传输TCP/IP协议包,如图4所示。

图4、PN控制器和PN设备的分片处理机制
以PROFINETRT为例来理解在整个通信的过程中实时性能是如何来保证的。
从通信的终端设备(PN控制器和PN设备)来看,首先采用了优化的协议栈,这一点可以在图1的②看到。这样一来在终端的设备上数据报文被处理的时间大大的缩短,这是实时性能保证的一个方面。其次是终端设备上采用的分时间段处理机制,这一点可以在图5看到。这样保证了在每个通信的循环的周期内终端设备即可以处理RT的实时数据又可以处理TCP或UDP的数据。且在每个循环内优先处理RT的实时数据。这里需要强调的是每个PN终端设备只对自己的负责,需要发送的数据会按发送循环发送、对于由其他设备发到自己的数据会进行立即接收,且发送和接收是并行处理。

图5、RT的时间调度机制
从通信的传输设备(SCALANCEX交换机)来看,首先采用百兆全双工的交换网络,这样一来每个终端设备的每个端口都是独享带宽,且可以双向不间断的收发数据。其次是交换机支持802.1P或802.1Q的标准,使得发到交换机网络的PN的数据帧被优先处理和转发,如图6所示。这一点保证了PN在网络上的快速转发,也是实时性能保证的另一个方面。
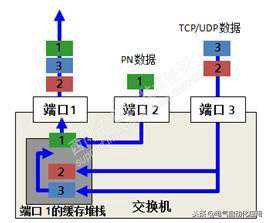
图6、交换机802.1Q的工作机制
上面介绍的是PNRT的实时性能从机理上如何保证的。而从量化的角度去分析的话,PNRT完全是靠计算来精确保证每个发送循环所能发送的报文及对RT数据的时间的预留。
对于RT来说,在物理层上传输的最小报文帧来为88个字节,最大报文帧来为1488个字节。其中包括了12个字节的帧间隔,如下图7所示。

图7、RT的报文的长度
百以太网的传输速率:
每个字节传输需要的时间:
最小的RT报文帧需要的传输时间0.08
一个PN控制下带3个最小报文帧(40个字节的C_SDU)的PN设备,PN控制器的发送循环为250,通信建立后在PN接口上抓报分析PN的通信可以分析出PN数据帧对时间调度的情况,如下图8所示。
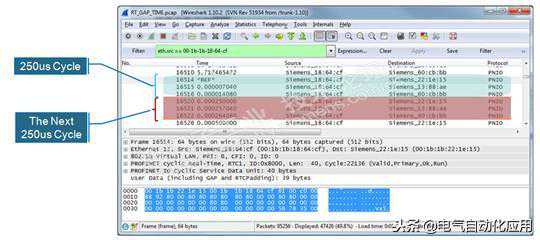
图8、PNRT的时间调度机制
除了对PROFINETRT和IRT的通信调度的分析外,还对PROFINET的抗干扰性作了大量的研究。在对PROFINET推广的时候,很多用户很关心PROFINET是不是和PRROFIBUS一样,存在抗干扰的性能差的特点。我从理论和实际实验上验证了PROFINET的抗干扰性能优于PROFIBUS的抗干扰性能。PROFINET是基于的以太网标准。所以对PROFINET的抗干扰分析实质上是对工业以太网的抗干扰分析。
好吧!理论说完了,我们实例讲解一下吧!
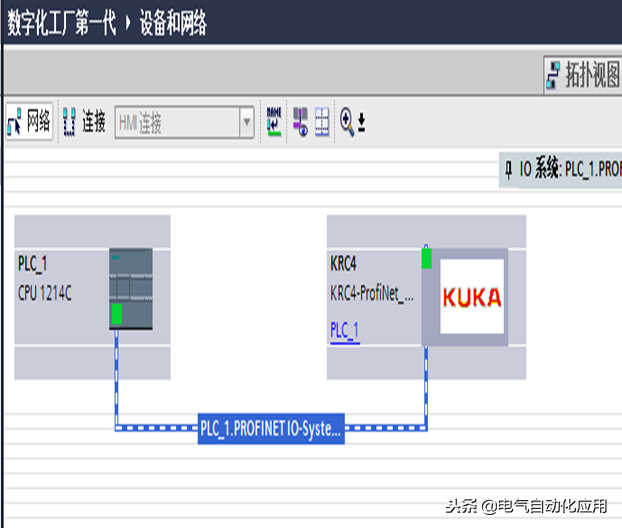
今天带来的案例是博途PLC通过PROFINET连接库卡机器人!
网线连接至控制柜门上的KLI端口,另一端连接到交换机,PLC也连接到交换机(交换机无型号要求),交换机再连接到电脑。
首先将编程电脑、PLC、KUKA设置成统一网段,因KUKA的底层设置原因,最好不更改机器人IP地址
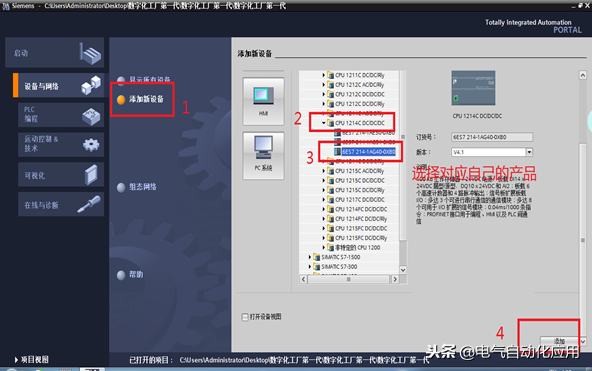

1:添加新设备2:导入GSD文件
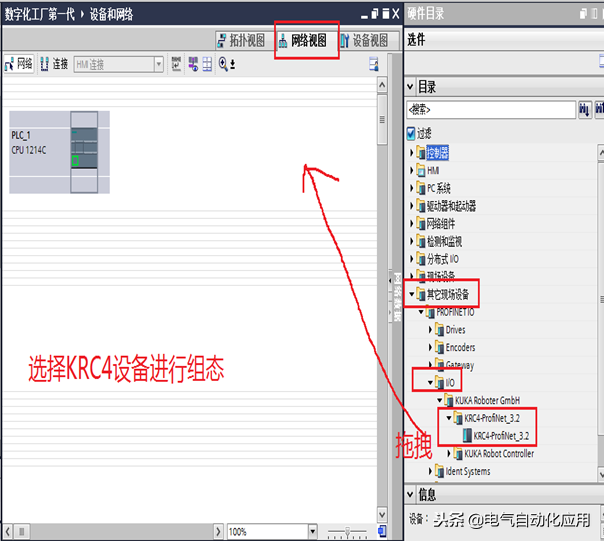
安装GSD,并把KUKA设备进行组态

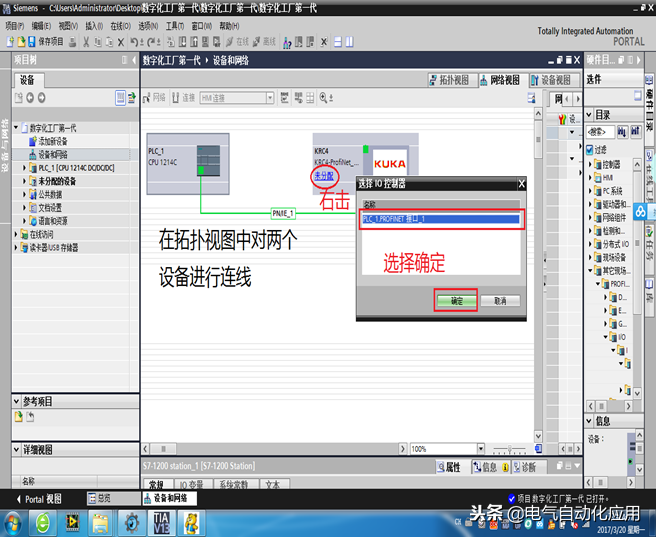
在视图里面进行连接
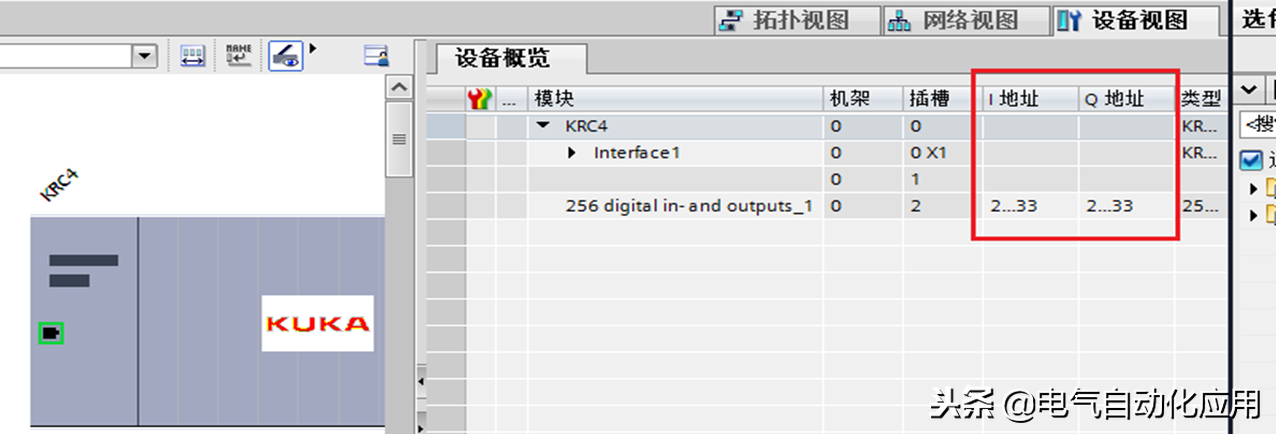
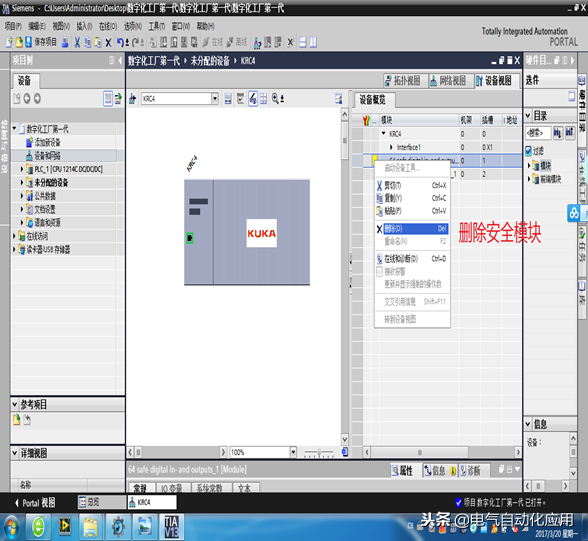
删除安全模块、设置地址、设备名称
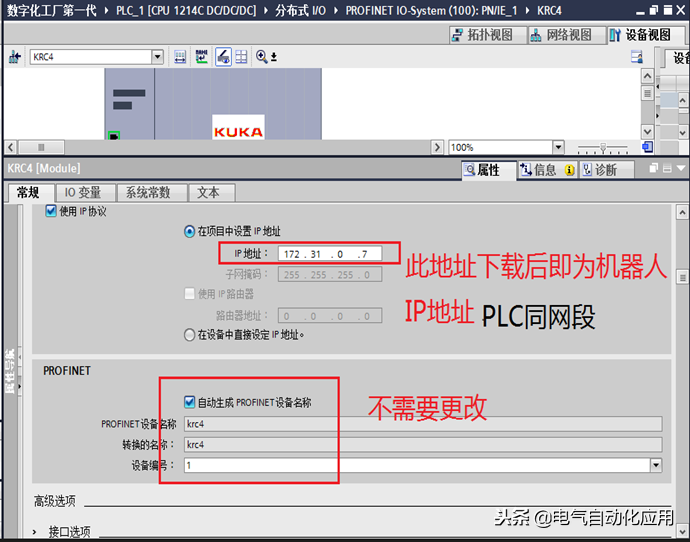
设置好以上后(包括PLC地址),接下来就可以编译下载到PLC。下载完成后PLC会报红灯,是因为下一级组件存在故障,即还没有设置机器人端,连接不到下一级组件,所以报错。也可以使用此方法判断是否连接成功。
WorkVisual对KUKA进行设置
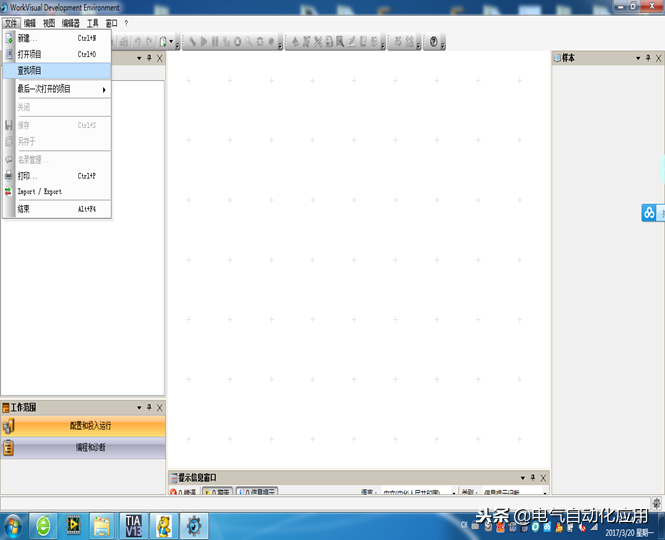
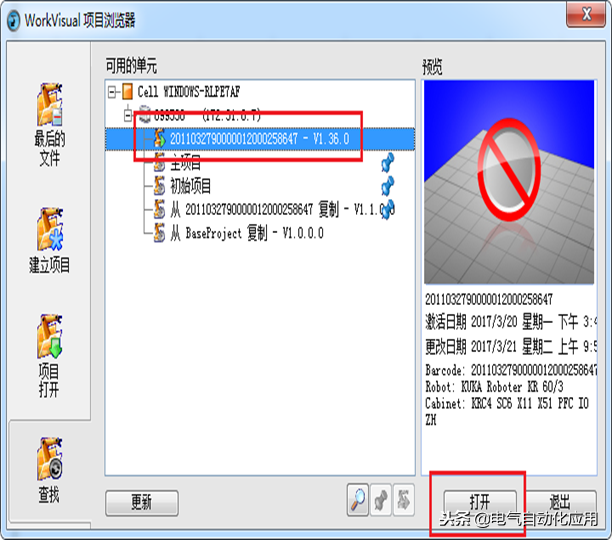
激活、添加Profinet、DTM选择Profinet


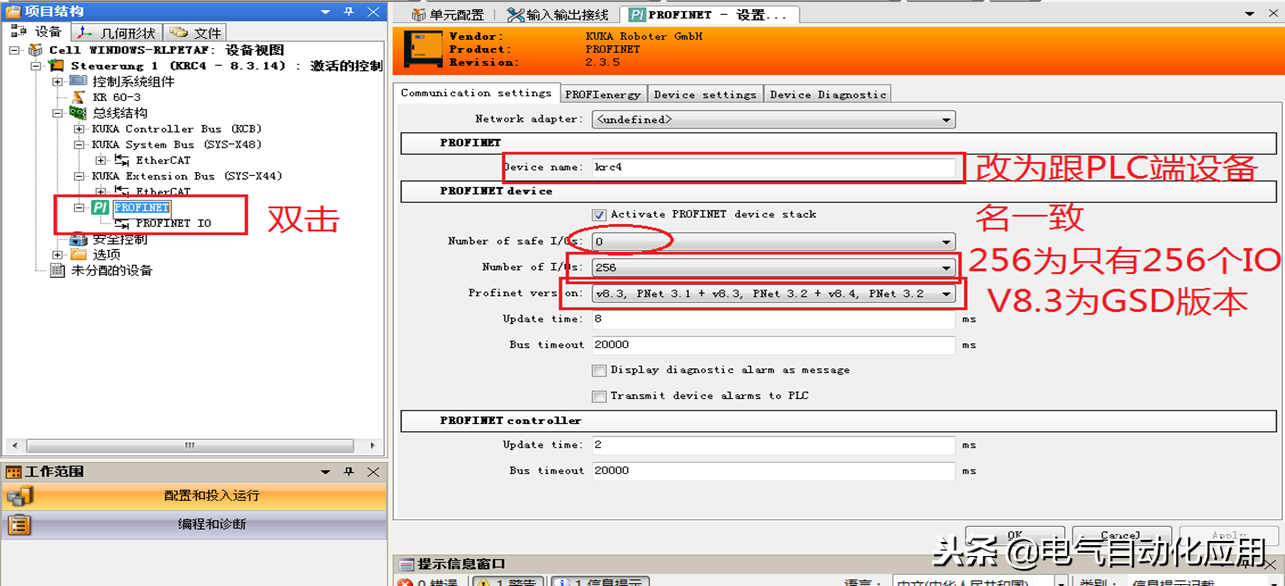
双击Profinet进行设置
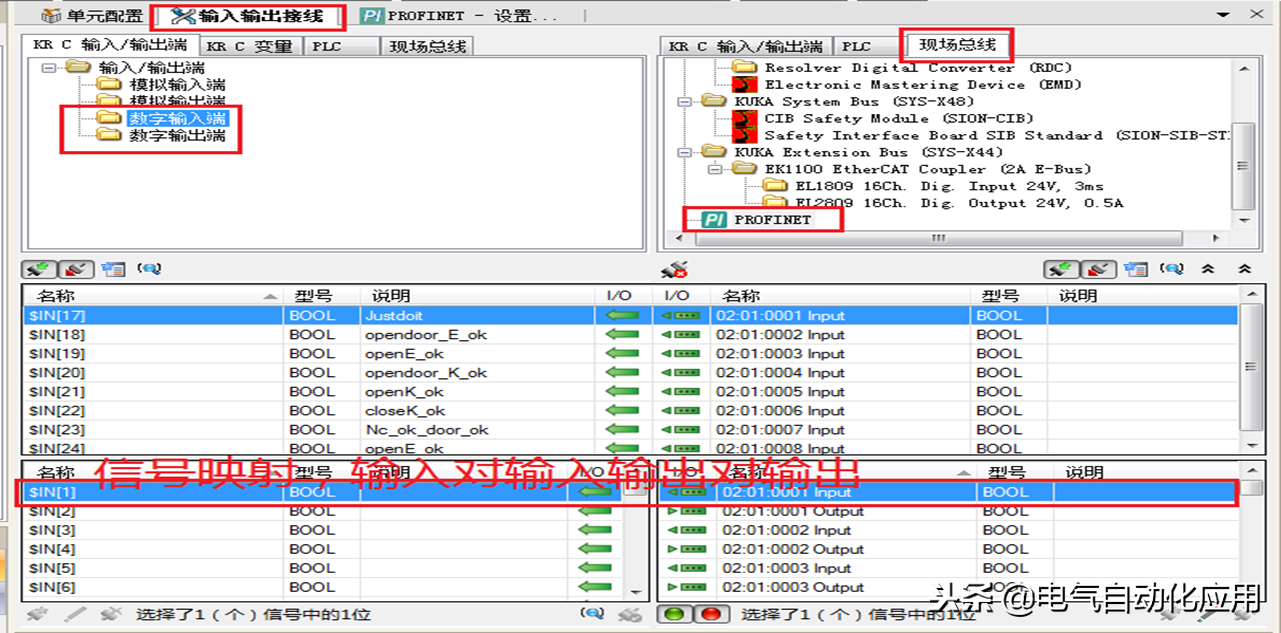
进行信号映射
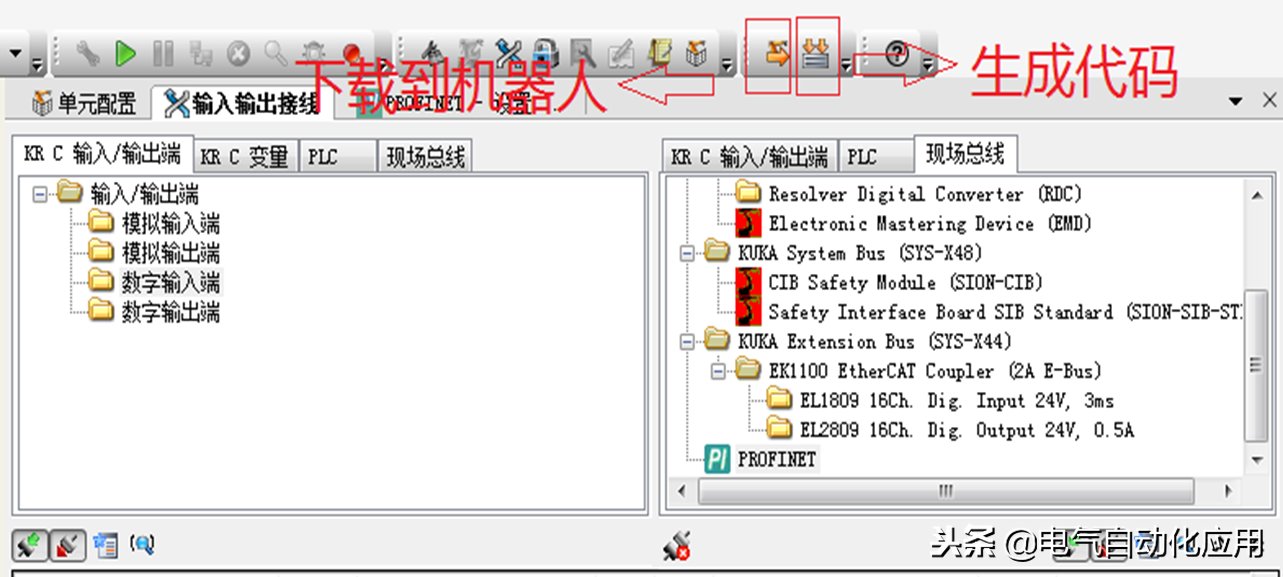
首先生成代码,再下载到控制器,注意在控制器上做好确认工作
机器人侧的信号确认:
机器人侧即为映射时的IN(..),PLC侧则是在博图里对KUKA设备设置时的IO地址