
1)设备采用左右乒乓测试结构;
2)控制器采用安川MP2300S运动控制器;
3)采用安川Σ7伺服电机,MechatroLinkII总线。
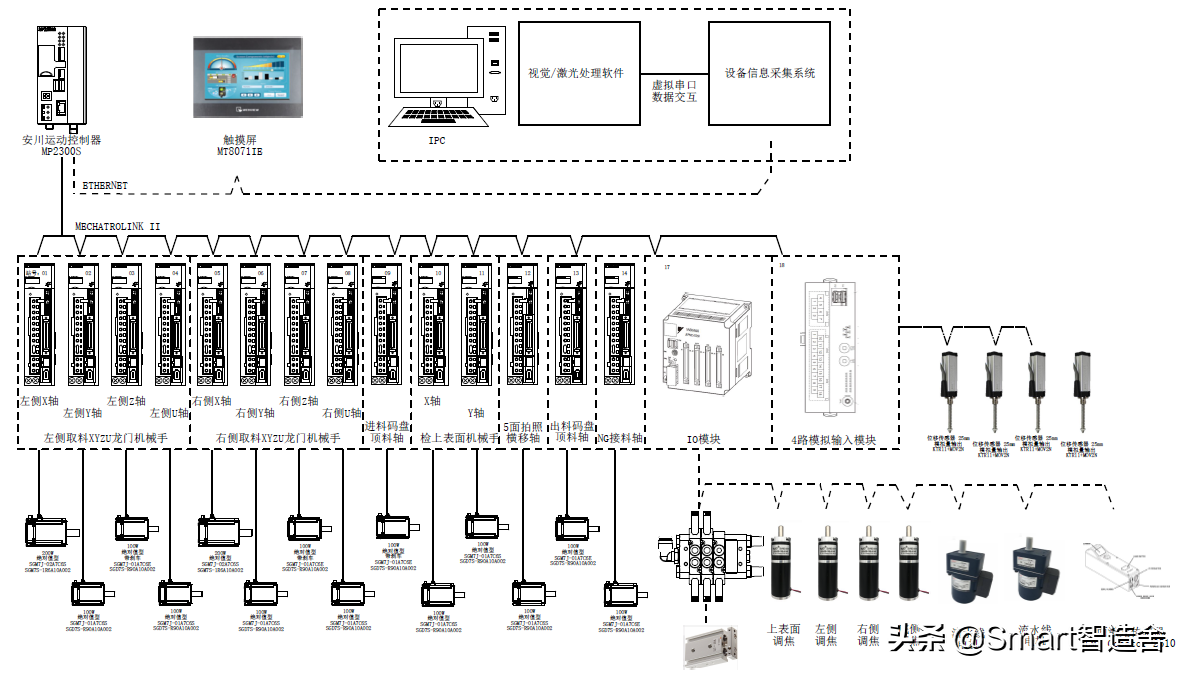
图1设备整体控制方案
2、问题描述
现场实际运行CT为3.5秒,比理论设计CT慢1秒,如不能改善,则设备无法通过验收。
3、原因分析3.1结构方面分析

图2左/右工位机械
1)根据手册,X,Y,Z轴速度分别可以达到800mm/s,400mm/s,400mm/s
2)根据运用场景,X,Y,Z轴运行距离分别为1400mm,300mm,400mm
3)根据速度和距离,理论上单机械手节拍4.8S,综合节拍2.4S。
3.2控制方面分析
1)分析发现消耗的时间,主要集中在电机的启停过程,动作与动作之间,不连贯。
2)查阅控制器资料,发现“MOV”指令“MVS”指令区别。确定动作不连贯,是由“”MOV“”指令进行准确定位造成,“MVS”指令脉冲分配结束后,马上开始执行下一条指令。

图3控制器指令资料
4、解决问题1)将定位要求低的点位由MOV指令,更改为MVS指令,改善动作的连贯性。
2)CT提升到2.4S,比设计CT还快0.1S。
我们有专门的工程技术交流群,入群请私信联系哦~



