上一篇中介绍了QD75的JOG运行,接下来继续分享QD75的回原点指令该怎么用。
首先我们先了解一下进行原点回归的动作需要用到哪些参数资料;
在QD75中,按照原点复归作业的流程,将如下所示的2种控制定义为“原点复归控制”。
这2种原点复归控制对“原点复归用参数”进行设置,将QD75中预先准备的“定位启动”、“定位启动”设置到“定位启动编号”中,通过将定位启动信号置为ON可以开始执行。
PS:此外,将专用指令□的启动编号设置为9001、9002也可执行原点复归控制。
(1)定位控制的原点确定--------------“机械原点复归”(定位启动)
(2)向原点进行定位-----------------“高速原点复归”(定位启动)
这里需要注意,执行"高速原点复归"时,需要事先执行(1)的“机械原点复归”,实际上的应用过程很少用(2),一般都是进行一个机械原点复归就行了;
我们这里主要用到就是机械远点复归;
那定位启动编号是哪个呢?
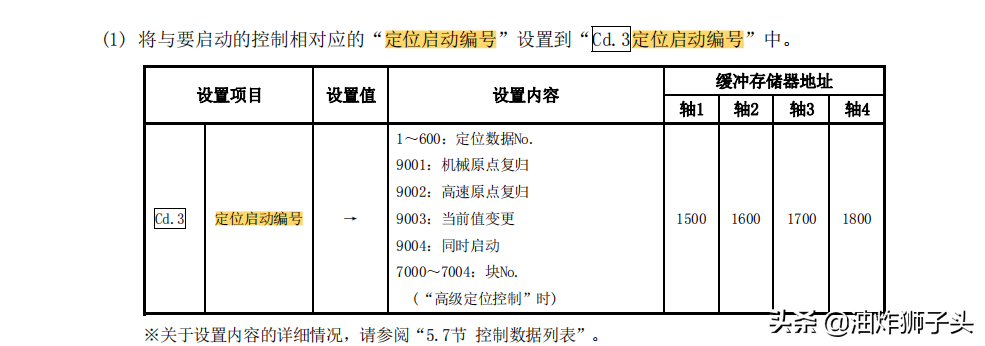
由图中可以看出轴1的启动编号是1500,轴1到轴4依次+100往后排,原点复归,定位控制都是需要用到这个定位启动编号的;
接下来需要了解QD75的机械远点复归方式有哪些?
在机械原点复归中,根据定位系统的构成及用途,对机械原点的确定方法(原点位置及机械原点复归结束的判定方法)进行指定。主要包括:①近点狗式,②止档停止式1-3,③计数式1
④计数式2;
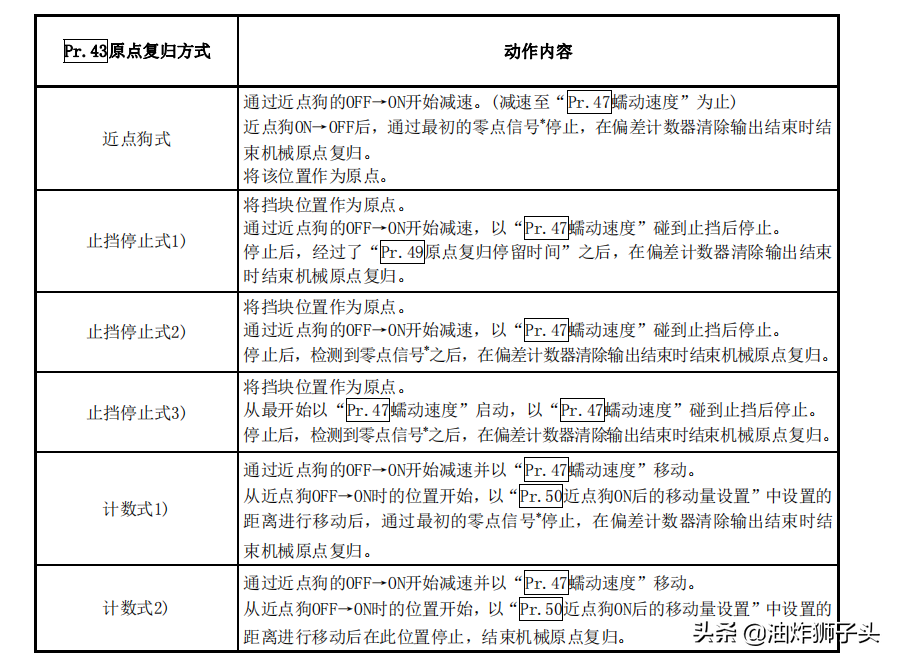
实际中回原点方式用的比较多的是近点狗式跟计数式2,这两种的回原点的区别就在于,近点狗式需要用到伺服的零点信号(Z相信号),计数式2则不需要用到Z相,也能正常完成回原点动作,实测回原点精度也是能达到微米级的;
了解了这些基本的信息之后,就话不多说直接上程序,参数的设置和接线图可以参考上一篇JOG运行篇;
首先写模块准备信号Y0,这个信号一定要有,不然模块不能正常工作,伺服使能信号Y200;

原点,极限信号;
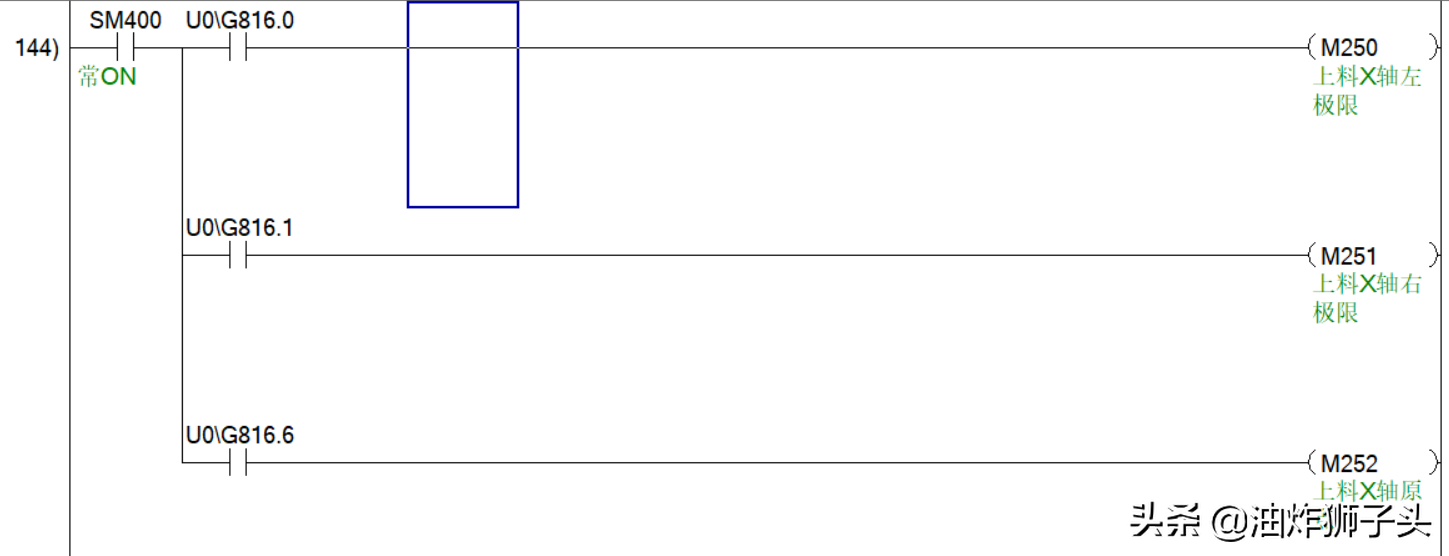
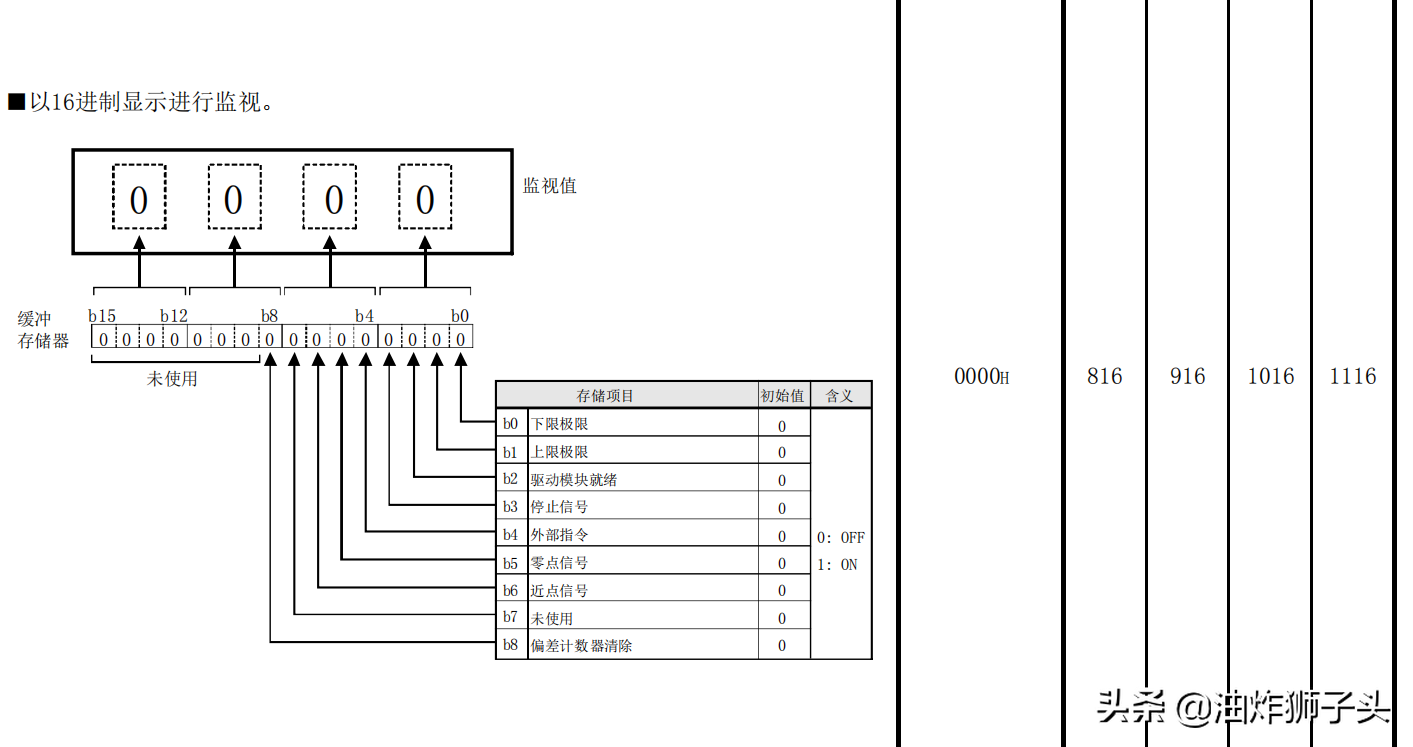
极限原点缓存地址表
回零;
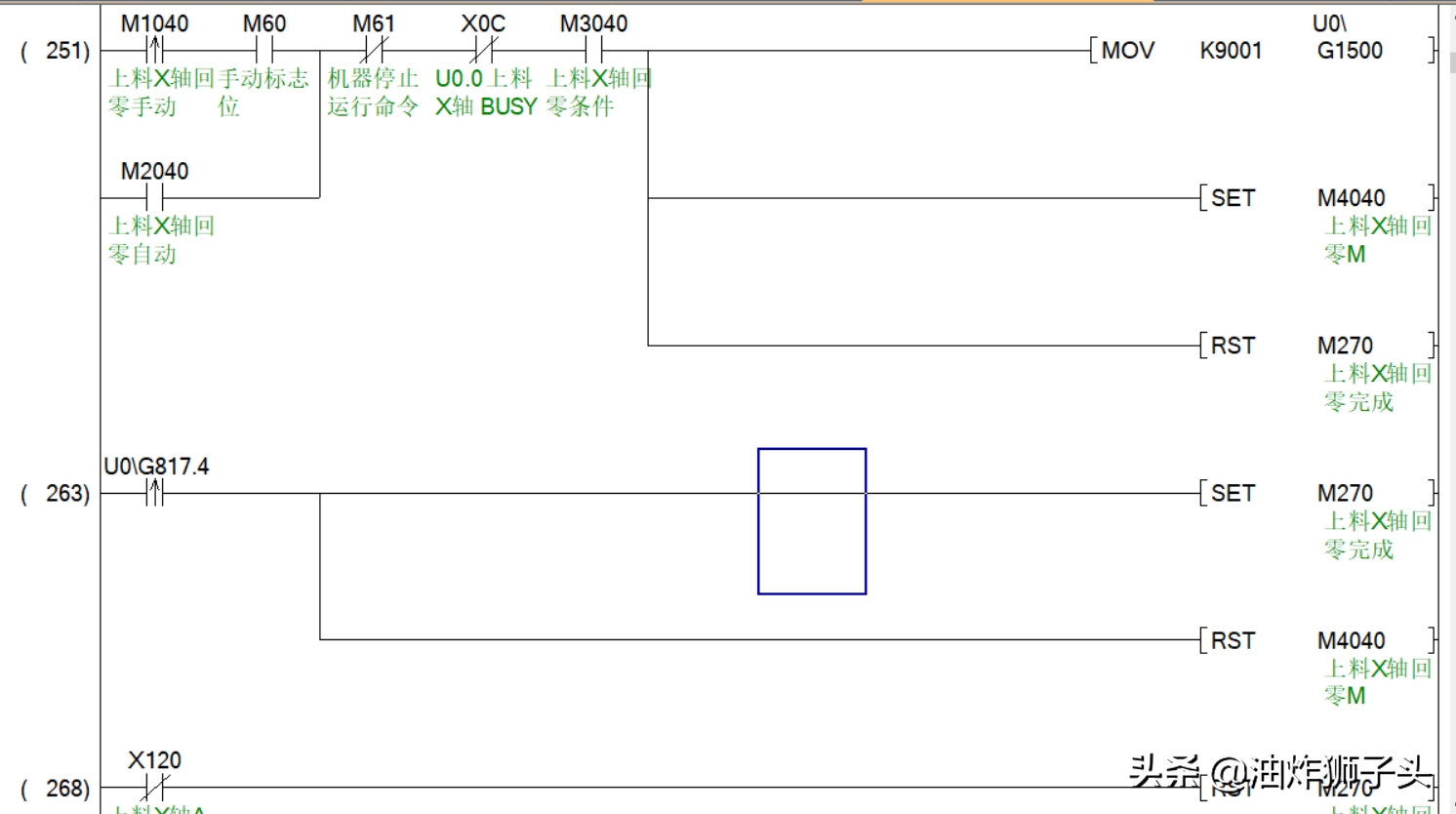

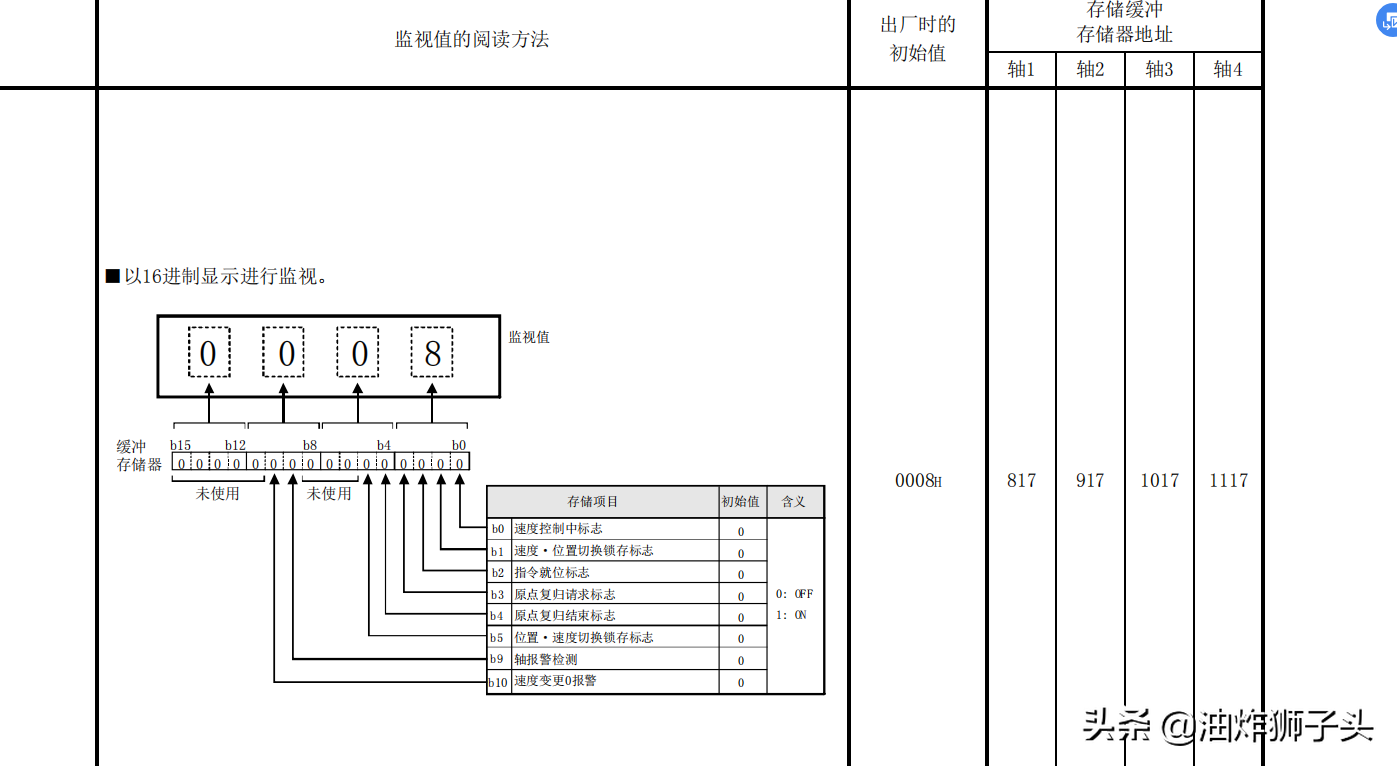
原点复归完成信号缓存地址
PS:由上图可以看到轴1的原点复归缓存地址是817的bit4位。



