1.参数设置
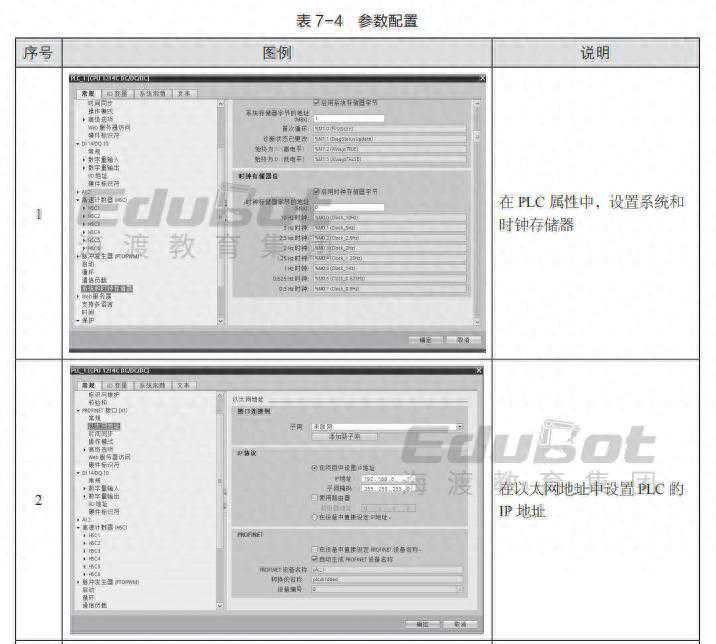
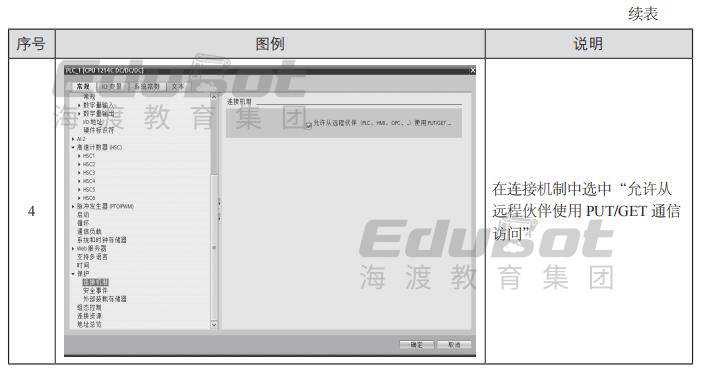
PLC参数设置见表7-4。

2.运动控制向导设置
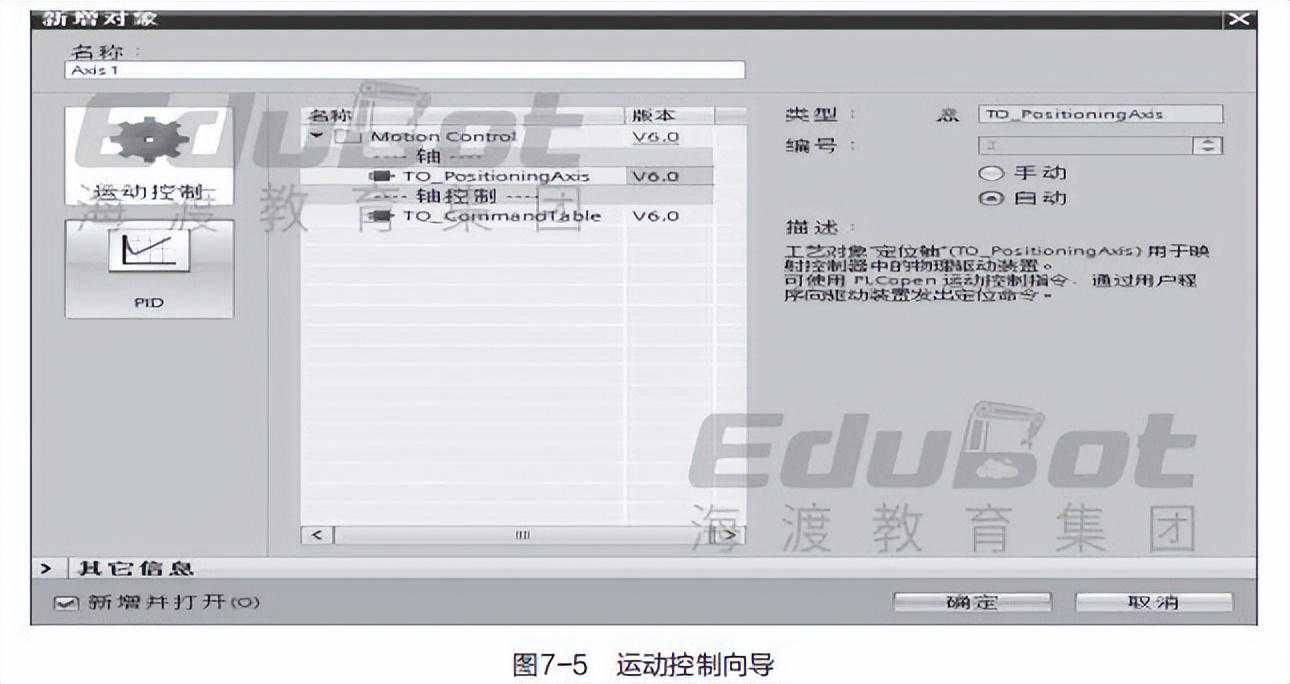
PLCS7–1200内置了运动轴控制功能,可用于速度和位置控制。为了简化位控功能的使用,TIAPortalv14提供的运动控制向导可以快速完成PWM、PTO的组态。该向导可以生成位控指令,可以用这些指令对速度和位置进行动态控制。运动控制向导最多提供4轴脉冲输出的设置,脉冲输出速度从20Hz~100kHz可调。运动控制向导如图7-5所示。
PLCS7–1200运动控制具有以下特点。
·提供可组态的测量系统,输入数据时,既可以使用工程单位(如in或cm),也可以使用脉冲数。
·提供可组态的反冲补偿。
·支持绝对、相对和手动位控式。
·支持连续操作。
·提供多达32组,每组包络最多可设置16种速度。
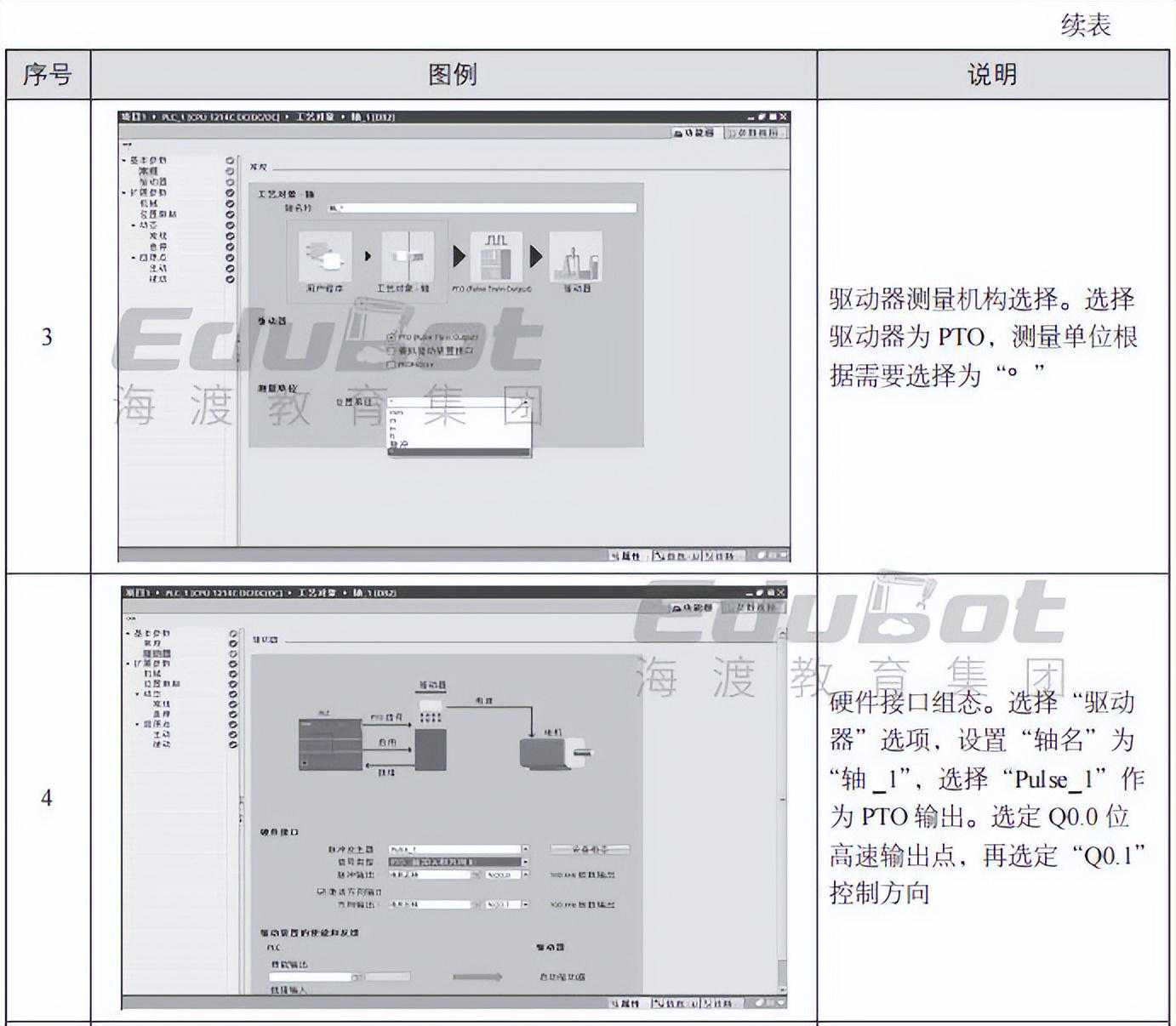
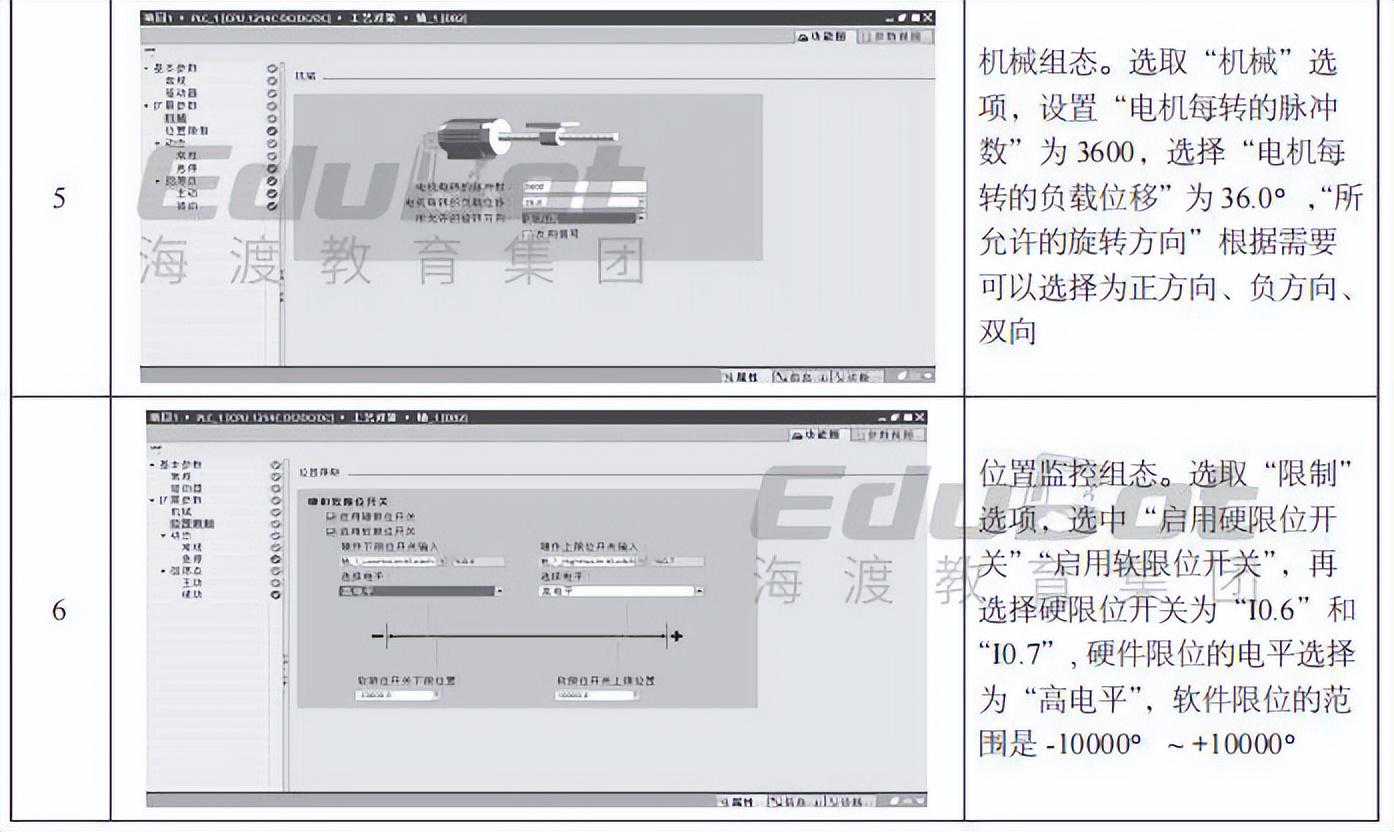
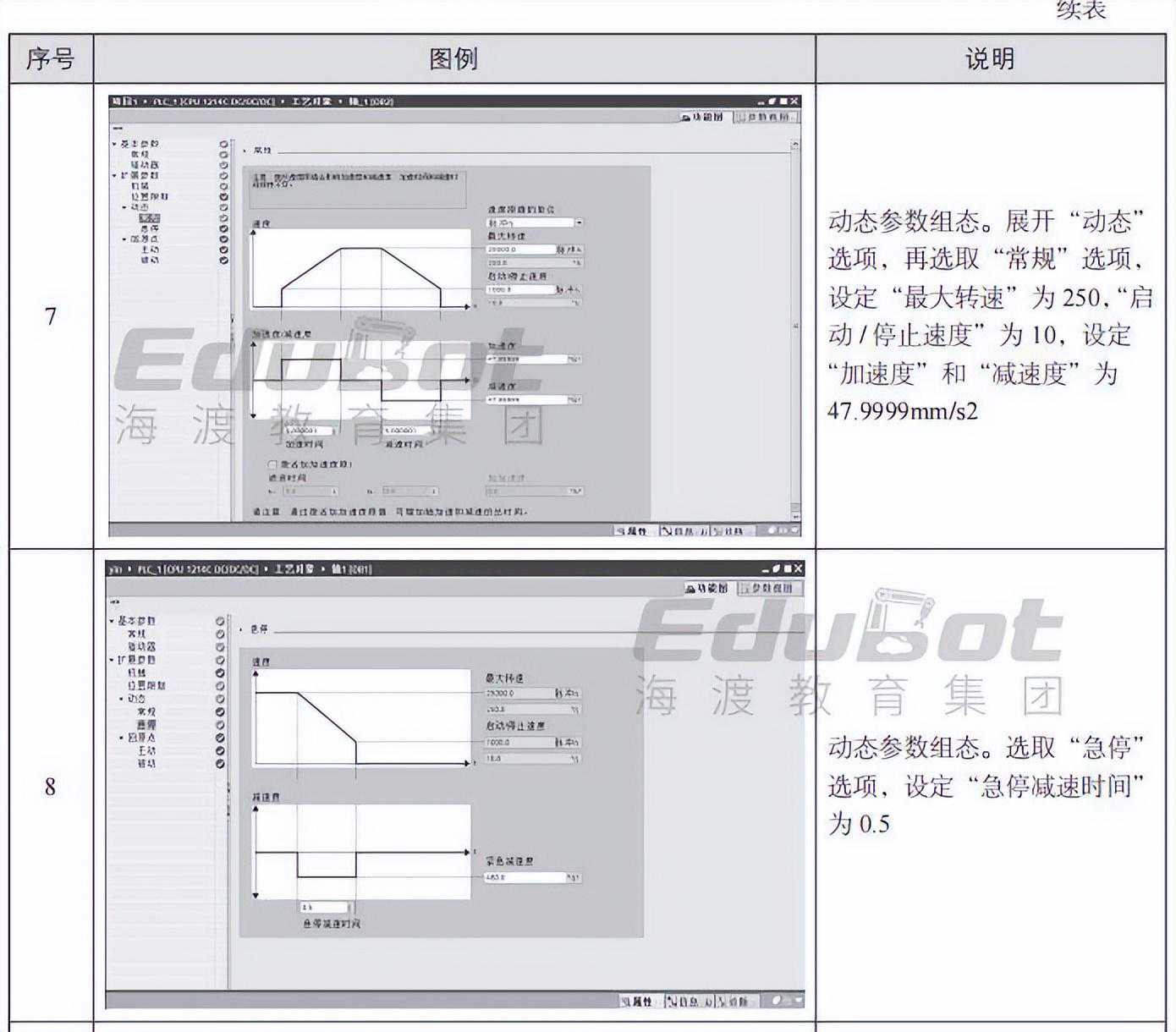
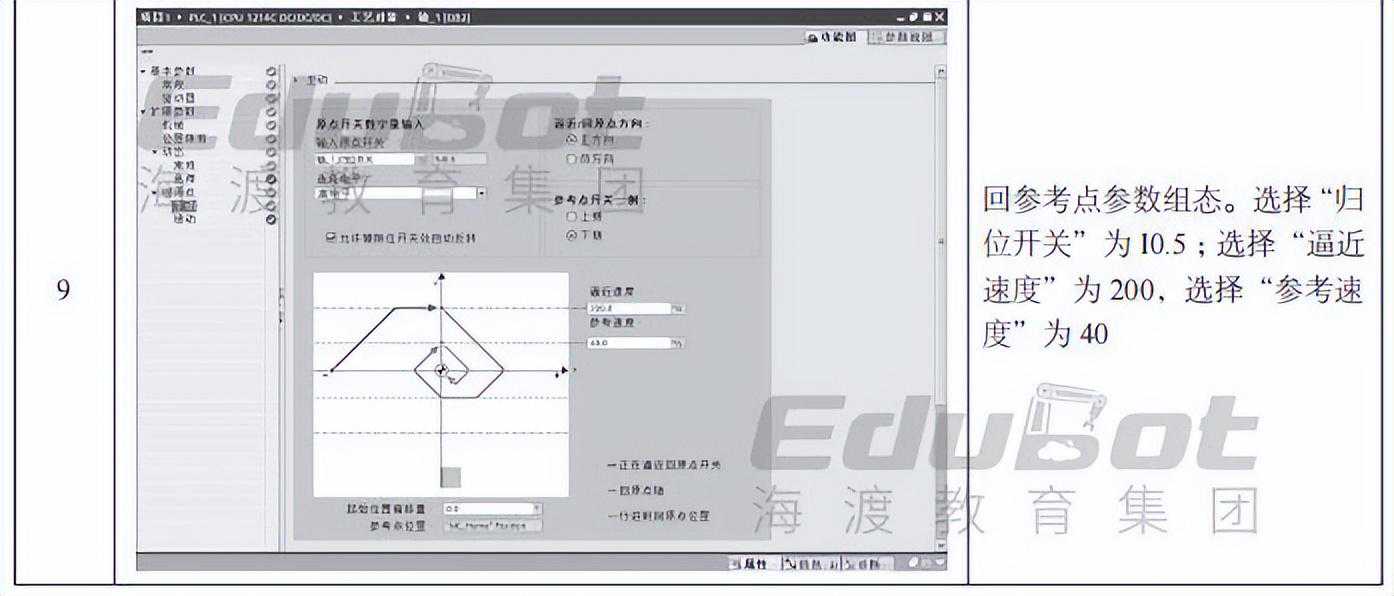
运动控制向导设置过程见表7-5。


3.运动控制指令
运动控制向导设置完成后,将生成若干运动控制指令供程序调用,其中常用的为MC_Power、MC_Home、MC_Movejog、MC_MoveRelative、MC_Reset等。
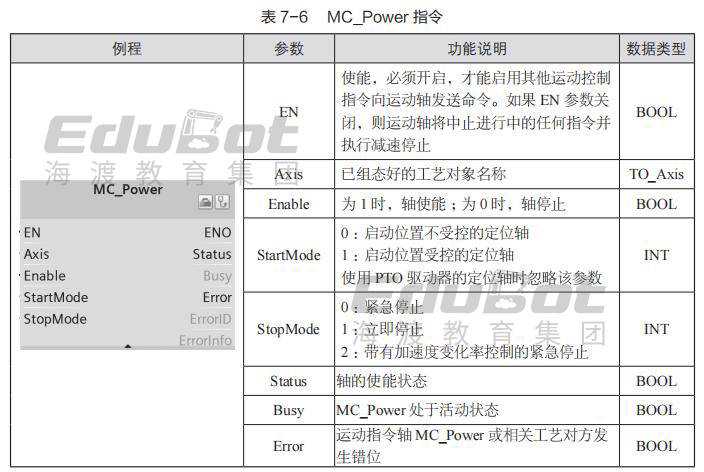
(1)MC_Power指令
MC_Power系统使能指令块启用或禁用轴,轴在运动之前,必须使能此指令块。
在项目中只对每条运动轴使用一次此运动控制指令,并确保程序会在每次扫描时调用此指令。使用(始终TRUE)作为EN参数的输入。MC_Power指令见表7-6。
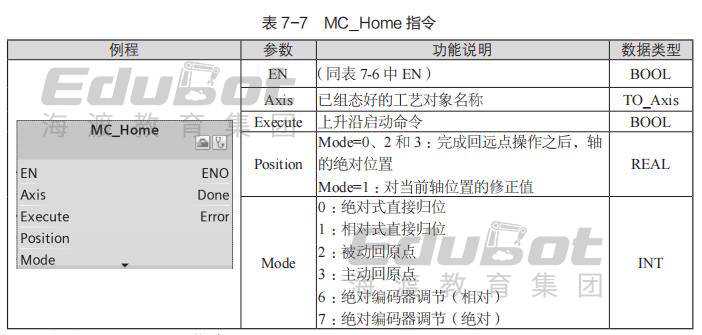
(2)MC_Home指令
MC_Home回参考点指令块(见表7-7)参考点在系统中有时作为坐标原点,这对于运动控制系统是非常重要的。
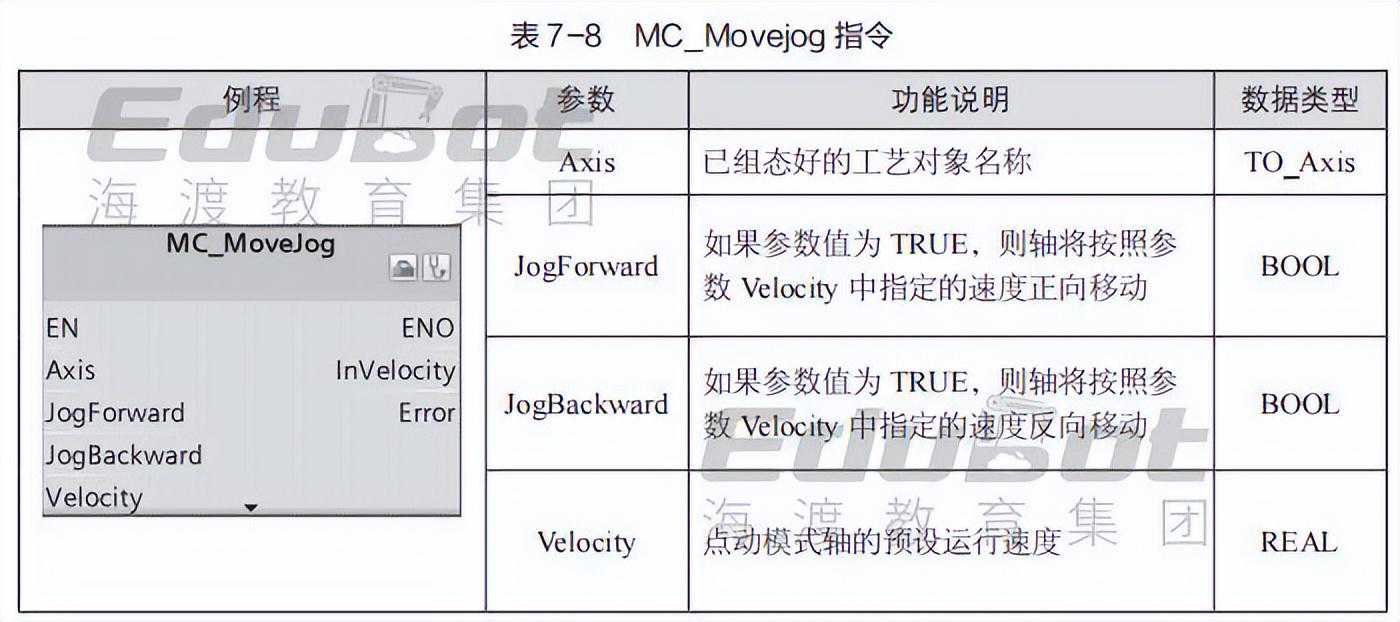
(3)MC_Movejog指令
MC_Movejog点动模式以指定的速度连续运动。这允许电机按不同的速度运行,或沿正向或负向慢进。MC_Movejog指令见表7-8。
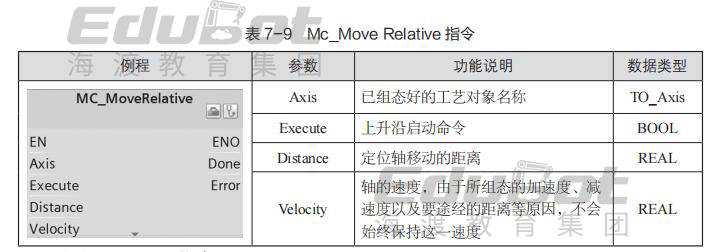
(4)MC_MoveRelative指令
MC_MoveRelative启动相对于起始位置的定位运动,具体参数功能说明如表7-9所示。
(5)MC_Reset指令
MC_Reset错位确定指令块对轴出现的错误故障进行复位,具体参数如表7-10所示。

4.PLC程序
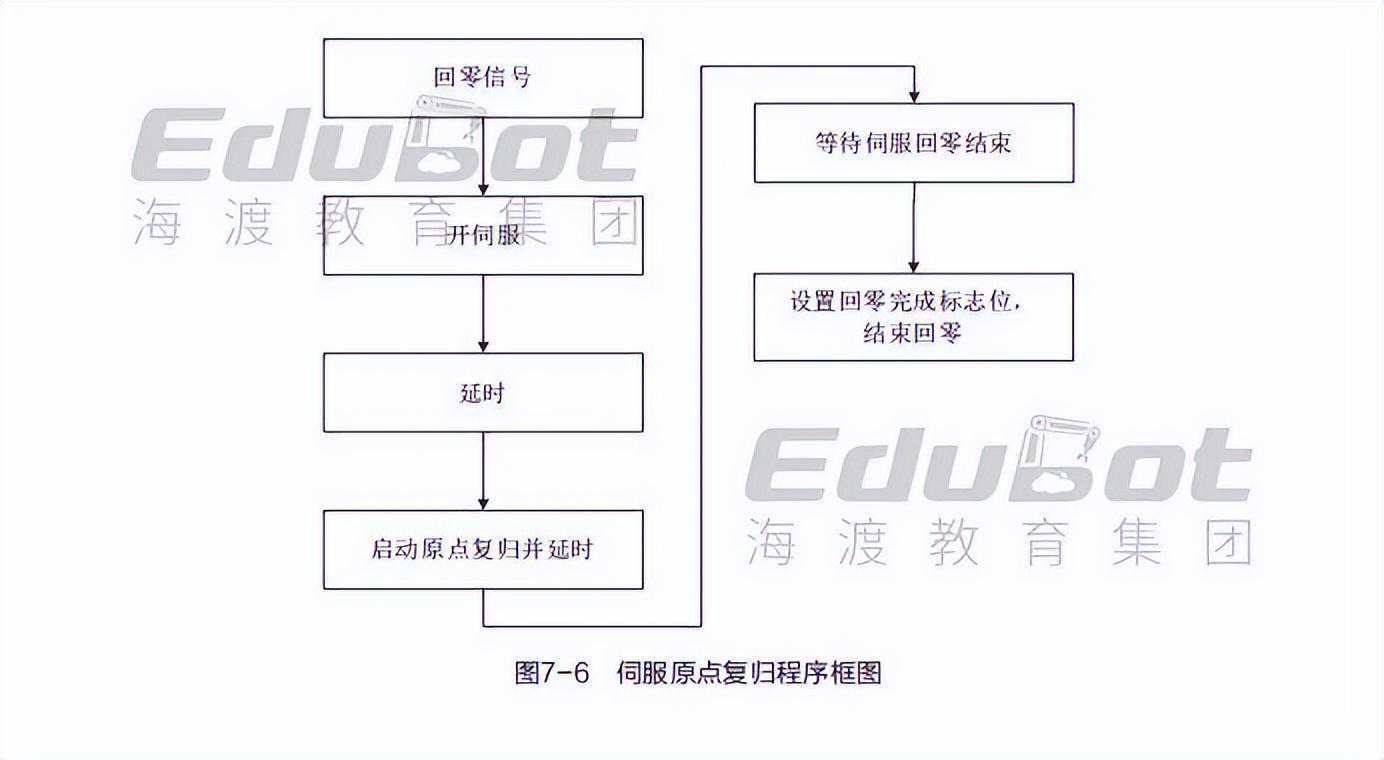
(1)伺服原点复归程序
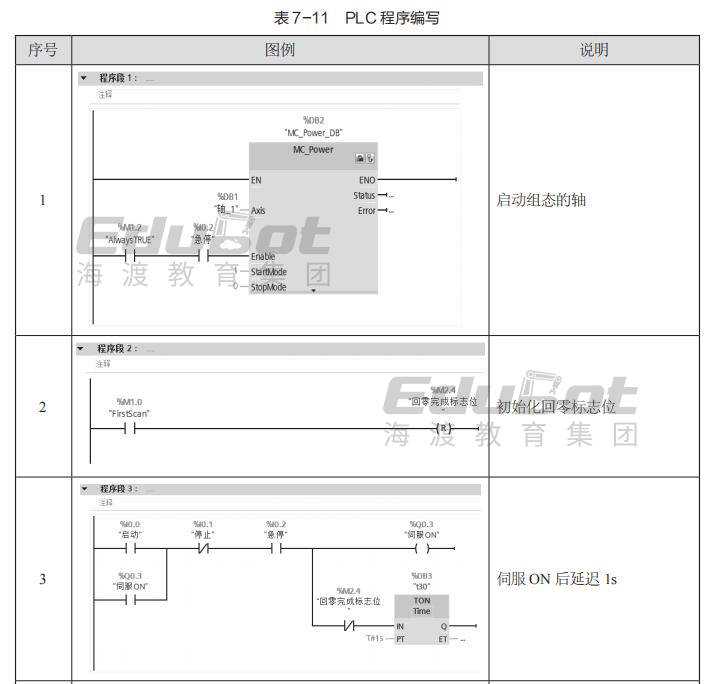
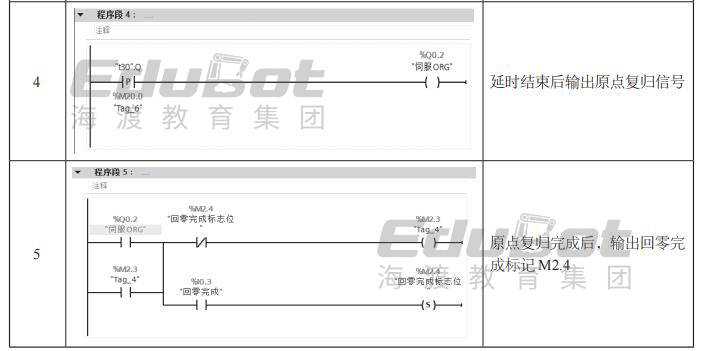
伺服原点复归程序用于确定伺服转盘机械位置,在每次开机设备启动时执行,可以通过伺服本身的回零指令ORG,或者PLC的回零指令MC_Home来确定是伺服转盘机械位置。下面以伺服本身的回零指令ORG编写伺服回零程序。程序框图如图7-6所示,程序见表7-11。
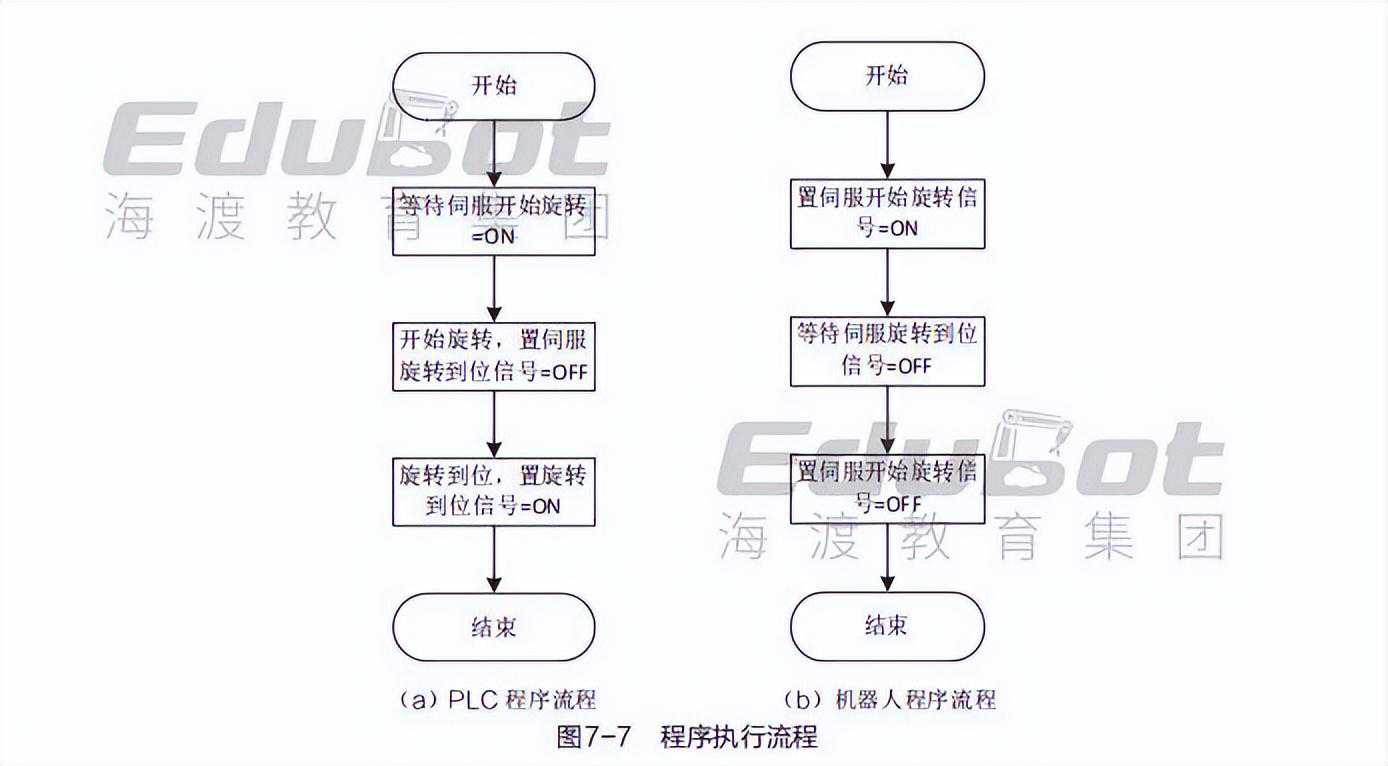
(2)PLC与机器人交互程序
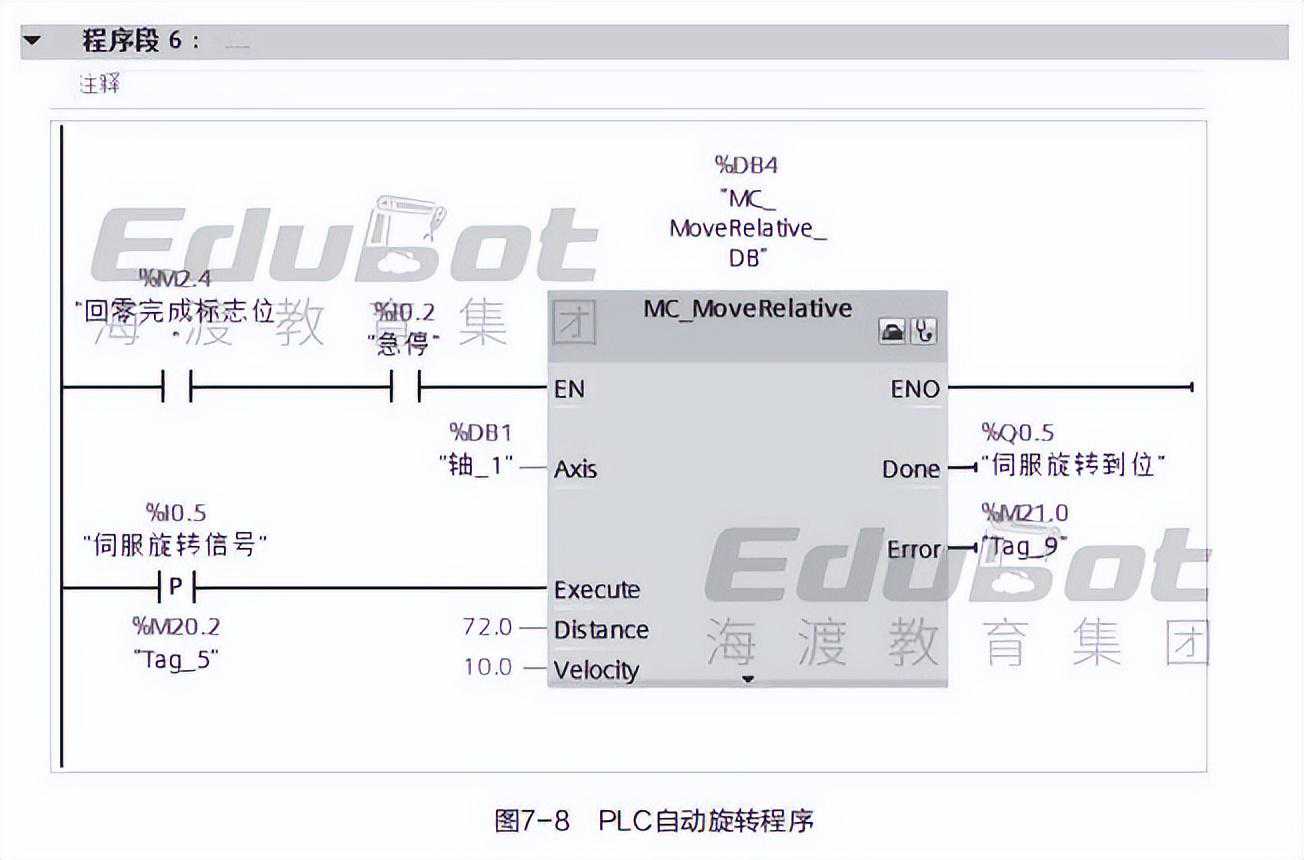
机器人和PLC之间通过伺服开始旋转和伺服旋转到位信号来进行交互,当伺服旋转到位信号为ON时,表示伺服已经到位,机器人可执行对应动作。PLC和机器人程序执行流程如图7-7所示。
PLC每次旋转72°,为1个工位,程序如图7-8所示。