欧姆龙NJ控制器(PLC)PID指令应用
常见的张力控制方式有三种:
以上第三种由于比较经济,在精度要求不高的情况下较为常见。
PID基本原理:
1、测量值PV(%)=当前模拟量值/模拟量行程*100;
2、设定目标值SP(%)=摆杆角度百分比,0%~100%(触摸屏设置);
3、执行系数=(目标值SP-操作量MV)/100;
4、输出频率=预设频率+预设频率*执行系数。
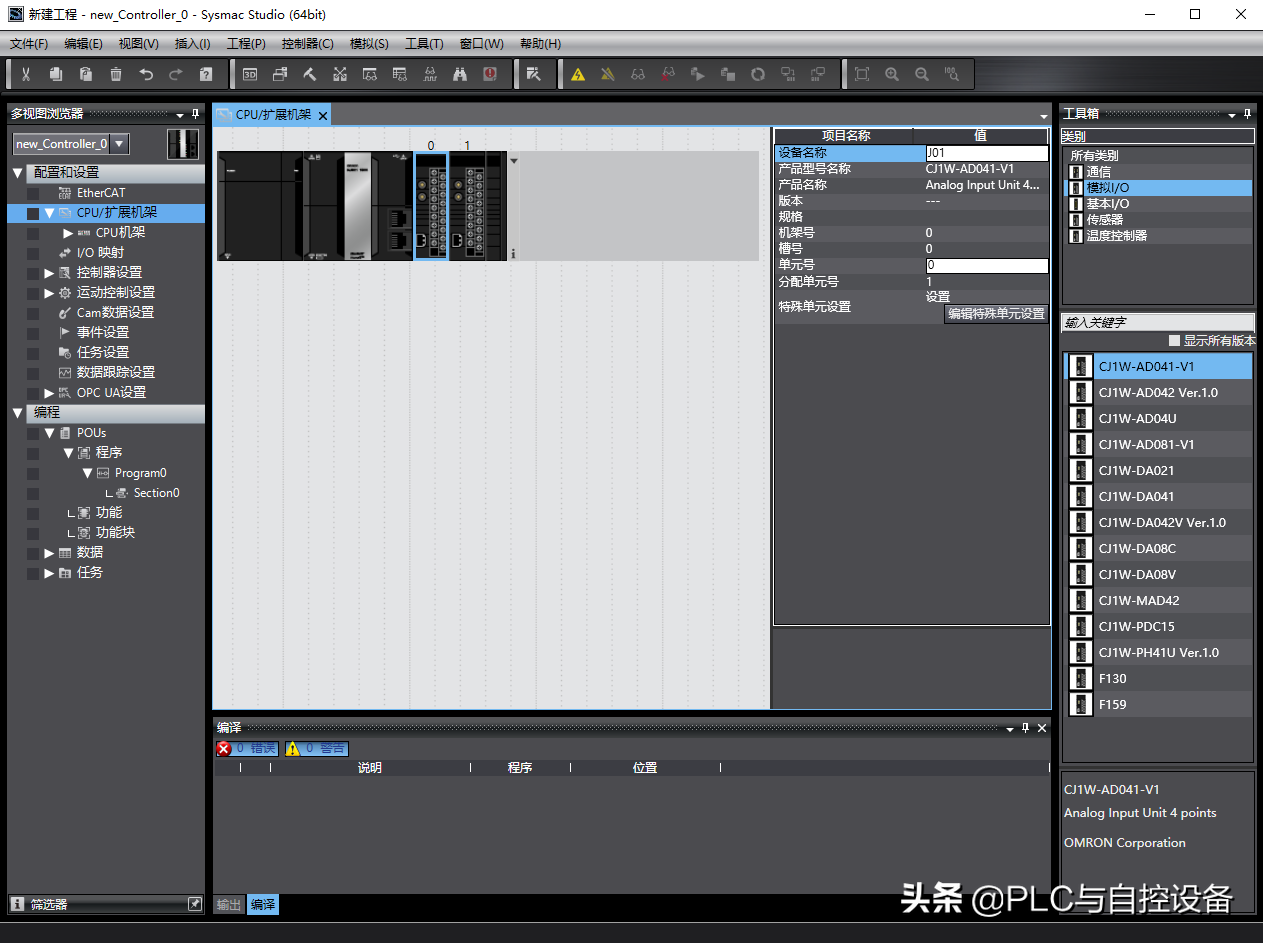
一、硬件配置/组态
2、在“工程属性”处,设置工程名称、作者、注释、类型等,设备类型选择“控制器”,选择对应设备型号与版本。
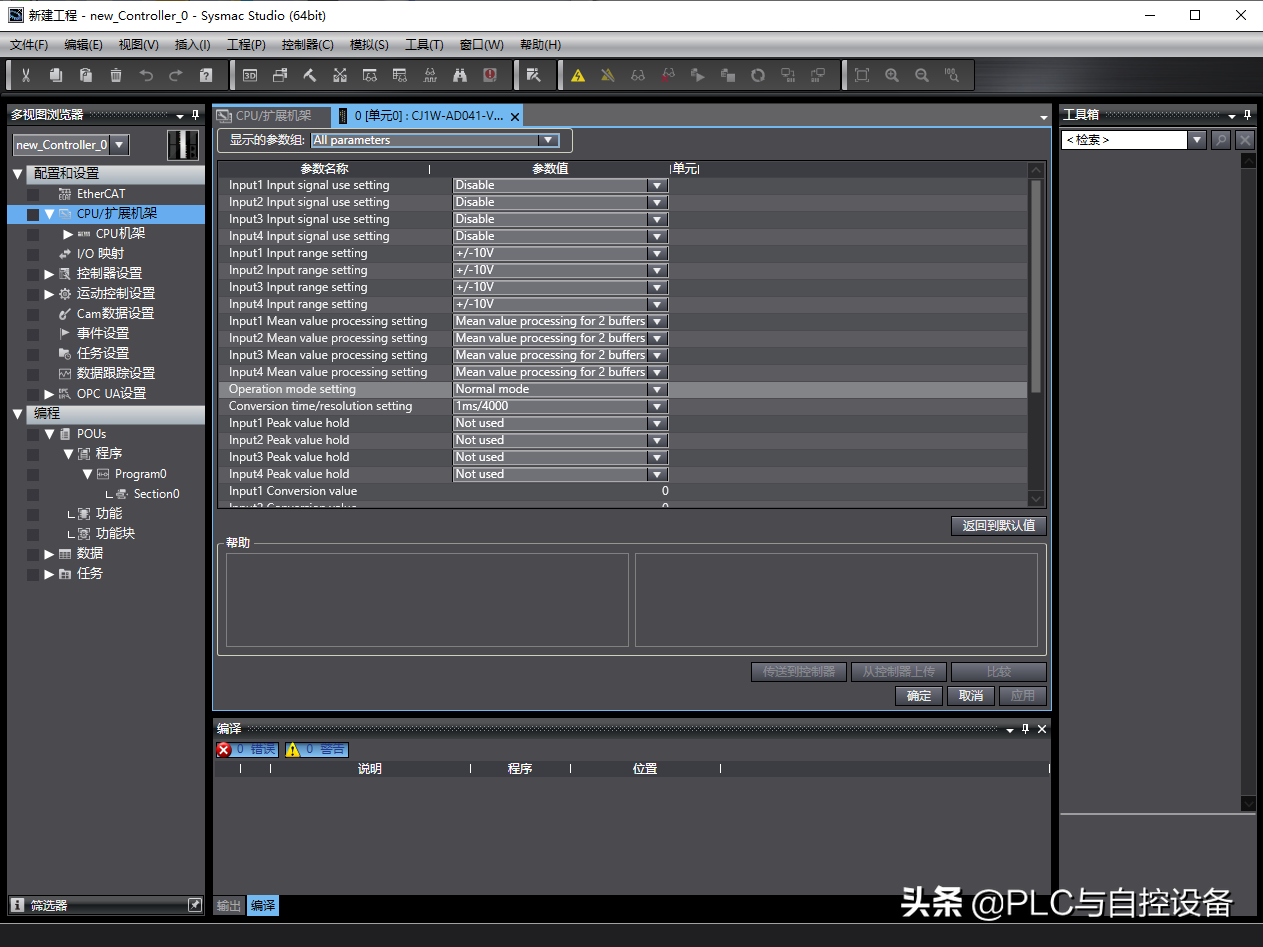
3、添加模拟量输入模块CJ1W-AD041-V1。
三、编写程序
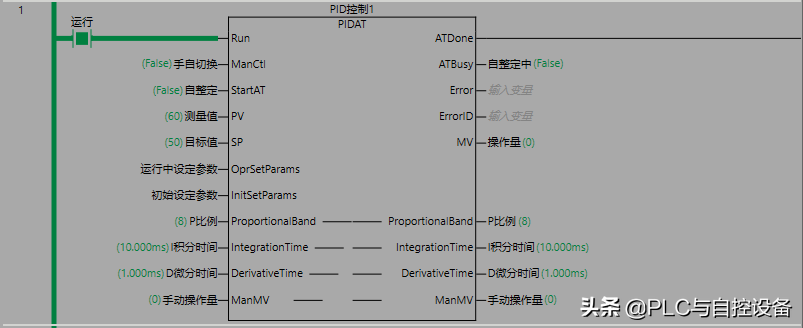
2、程序写在开头的,不一定是最先写的程序,只是PLC首先要执行的程序。运行中设定参数和初始化参数是两个结构体数据类型,参考指令手册设定其中的必要参数。

1、PIDAT指令各引脚定义,可以自动调谐,也可以手动调谐。
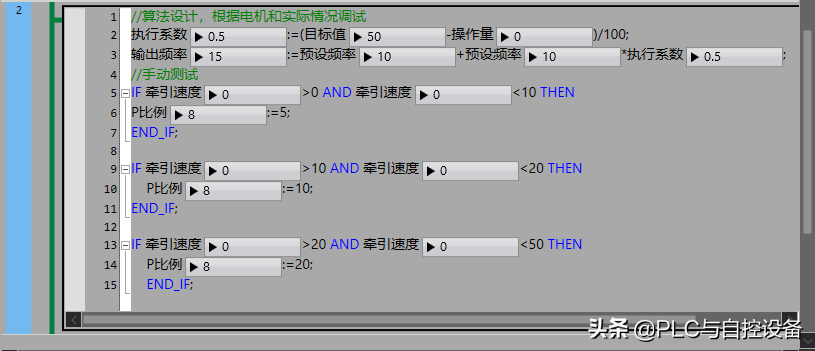
3、设计算法(公式),边调边改。程序不是会不会写,而是会不会调,别人问你会不会写,就说会好了,毕竟它是调试出来的,反复测试出来的,哈哈。


X12000H投影机测评")
