DX200可构筑用一台控制柜同时控制多台机器人或多个外部轴系统。
协调/独立控制功能是使机器人或外部轴协调作业或者独立作业的功能,该功能可根据作业要求选择最佳动作方式。
1.协调控制
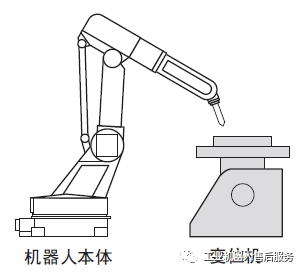
协调控制功能是指同时控制多台机器人与工装轴的功能。
〈例〉:可用于机器人与外部轴协调作业。
也可用于两台机器人间的协调作业。
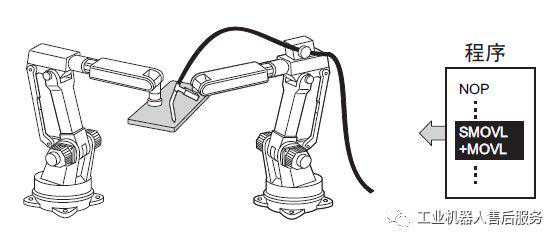
进行协调控制的程序称为协调程序。协调程序同时控制两个轴组。
2.系统操作流程
登录轴组组合
机器人与外部轴间协调校准
新建协调程序
登录移动命令
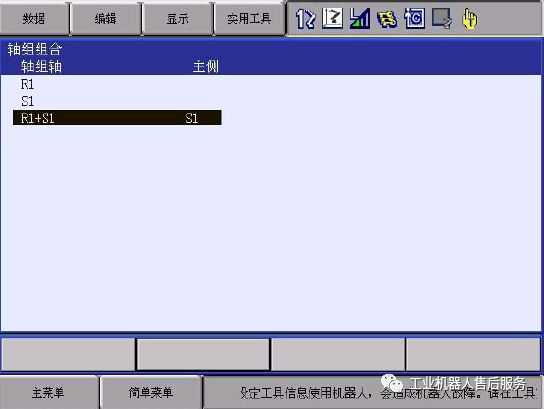
2.1登录轴组组合
登录机器人与工装轴的组合。
1.从主菜单中选择【控制柜设置】
2.选择【登录轴组组合】–显示轴组组合登录画面。

3.按[选择]
–显示选择对话框。
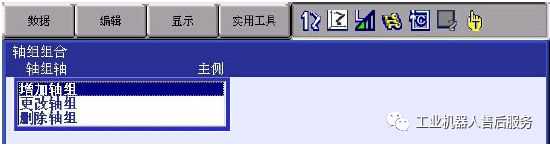
4.选择【增加轴组】
–显示轴组组合设置画面。

5.按[选择]
–显示选择对话框。

6.选择需设置的轴组
–在“主侧”设置工装轴。

7.按“执行”
–返回到轴组组合登录画面。
2.2机器人工装轴间的校准
在机器人与工装轴之间执行协调动作时,需要事先登录相互的位置关系。
该相互位置关系的设定就是机器人工装轴间的校准。
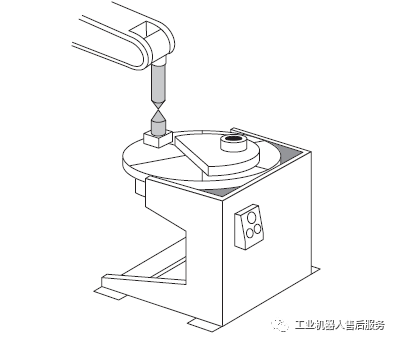
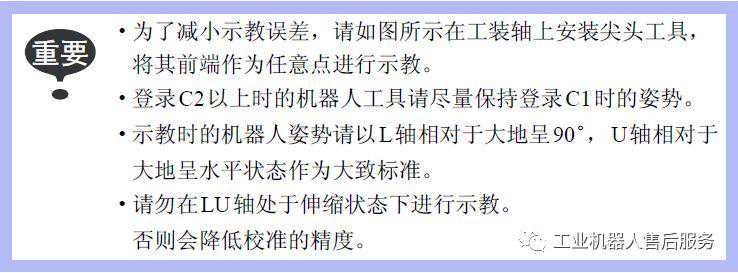
2.2.1校准工具的设定
1.在机器人上安装校准用工具
–请使用知道正确尺寸的工具。
2.选择主菜单的【机器人】
3.选择【工具】
–显示工具画面。

4.输入工具尺寸
5.按[回车]
2.2.2校准位置的示教
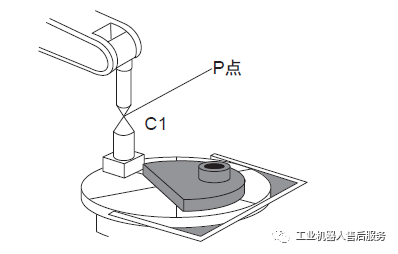
旋转1轴的工装轴时
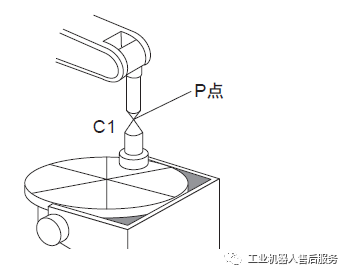
1.在工装轴的转台上确定任意的点(P点)。(离转台旋转中心尽可能远的位置)
将机器人的控制点与P点合并,登录C1。
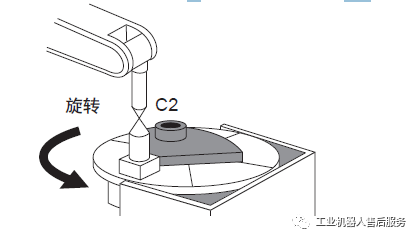
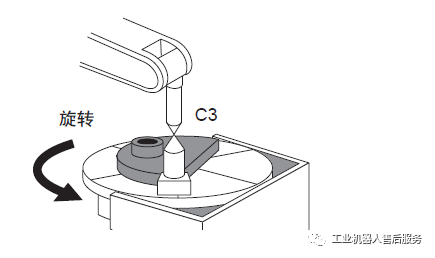
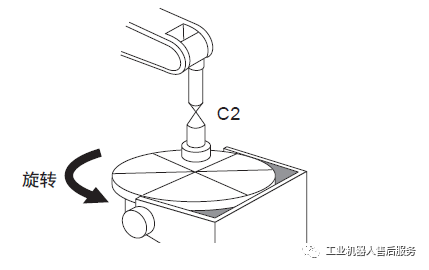
2.使工装轴旋转任意量。
旋转量没有限制,但请旋转30゜以上。
旋转方向+-皆可。
将机器人的控制点与旋转后的P点合并,登录C2。
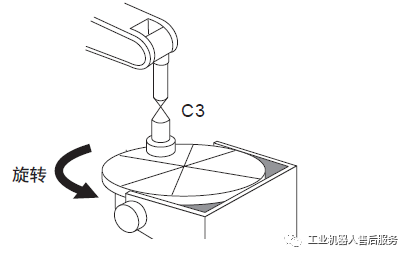
3.使工装轴沿2中旋转的方向旋转,将机器人的控制点与旋转后的P
点合并,登录C3。
旋转2轴的工装轴时
1.在转台上确定任意的点(P点)(离转台旋转中心尽可能远的位置)。
使工装轴的第1轴相对于大地呈水平状态,将机器人的控制点与P
点合并,登录C1。
2.使工装轴的第2轴旋转约30゜。
将机器人的控制点与P点合并,登录C2。
3.使工装轴的第2轴再旋转约30゜。
将机器人的控制点与P点合并,登录C3。
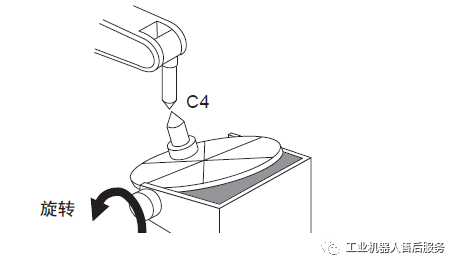
4.使工装轴的第1轴旋转约30゜,将机器人的控制点与P点合并,登
录C4。
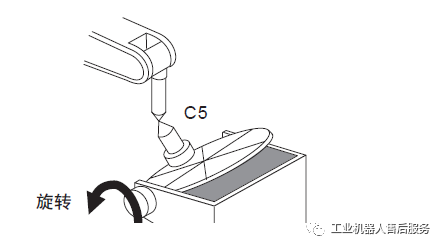
5.使工装轴的第1轴再旋转约30゜,将机器人的控制点与P点合并,
登录C5。
2.2.3校准的操作
1.选择主菜单的【机器人】
2.选择【机器人校准】
–显示机器人校准一览画面。
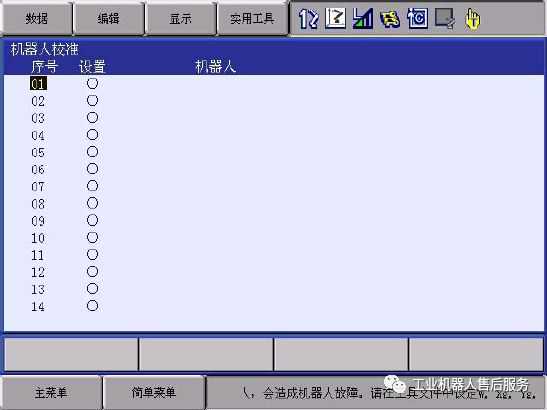
3.选择机器人校准号
–显示机器人校准示教画面。

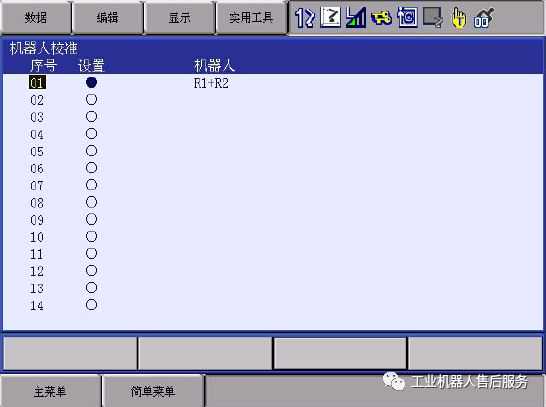
4.选择“机器人”
–显示选择对话框。
(1)选择校准对象控制组。

5.选择需校准的轴组组合
–画面上显示示教位置。
6.选择“设定位置”
–显示选择对话框。
(1)选择需示教的设定位置。
7.用轴操作键将机器人移动到所需的位置
8.按[变更]、[回车]
–登录校准位置。
–重复6~8的操作,对设定位置C1~C3进行示教。
–画面中的“●”表示示教完成,“○”表示未完成。
–校准位置按每个轴组显示。
–按[翻页]进行画面切换。

9.选择“完成”
–执行机器人校准。
–校准完成后显示机器人校准一览画面。
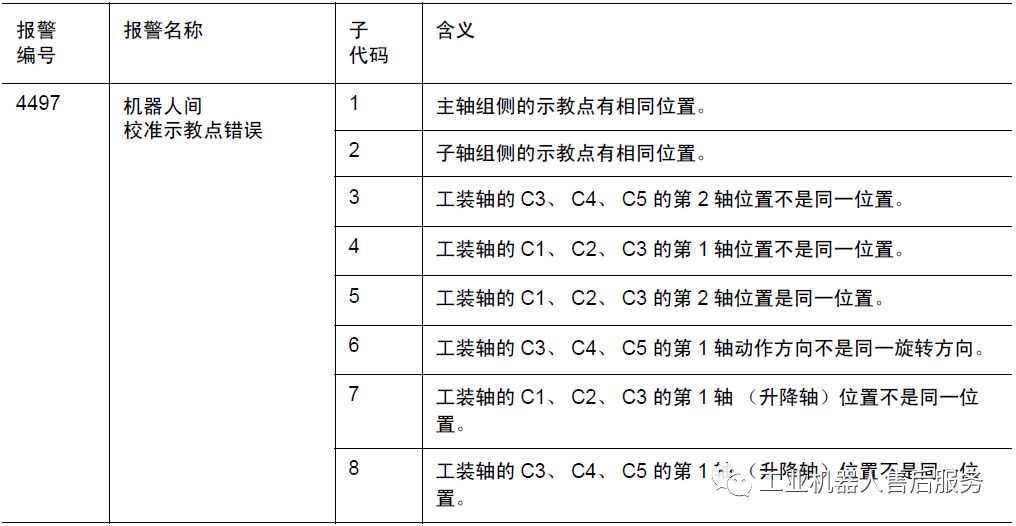
校准示教错误时的报警:
2.3程序内容画面
协调程序的内容如下所示。
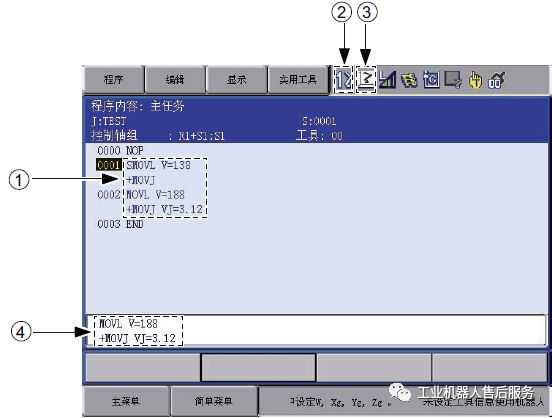
①命令
协调程序中移动命令显示为2行。
上方为从侧,下方为主侧。
SMOVLV=138←从侧机器人
+MOVJ←主侧工装轴
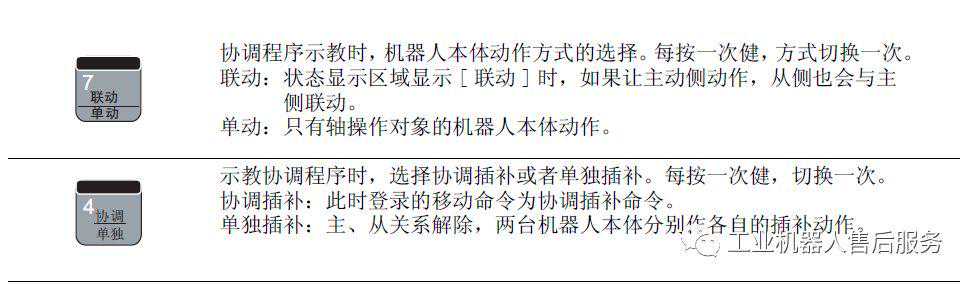
②连动/单独
连动/单独用于选择轴操作时机器人的动作方式。
选择连动时显示此标记。
按[连动/单独]键,可进行连动/单独的切换。
③操作对象轴组
显示轴操作对象的轴组。
按下[机器人切换],即切换为机器人。
按下[外部轴切换],即切换为工装轴。
④协调插补/个别插补
按[协调]键,可进行协调插补/个别插补的切换。
2.4连动/单独
示教时的轴操作有“连动”和“单独”两种方式。
按[连动/单独]键,可进行连动/单独的切换。

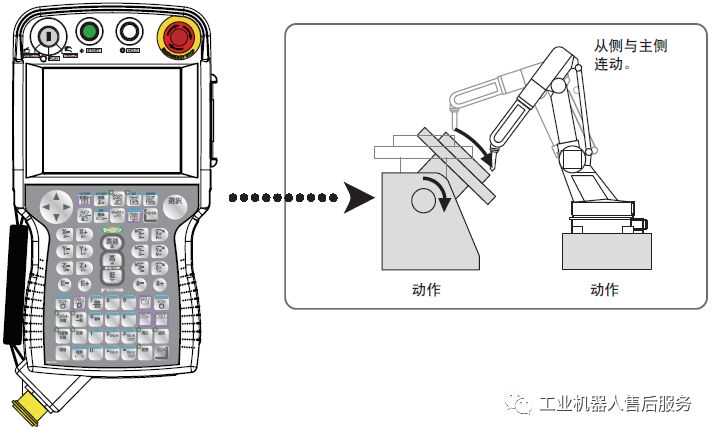
2.4.1连动
以“连动”方式进行轴操作时,主侧(工装轴)动作时,从侧(机器人)
也跟着动作。
在需要保持机器人与工装轴的相对位置时使用。
但是,启动从侧并不能使主侧动作。
轴操作对象为主侧
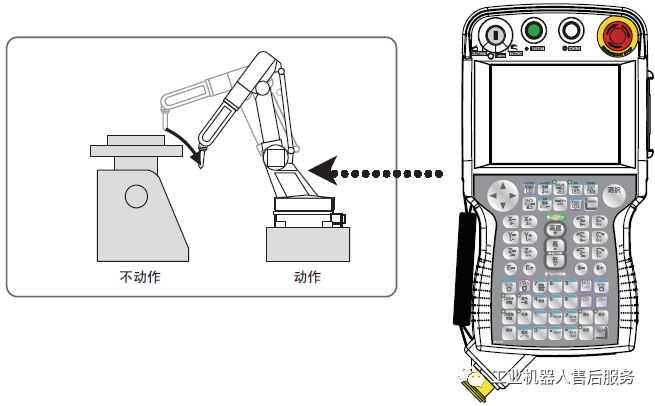
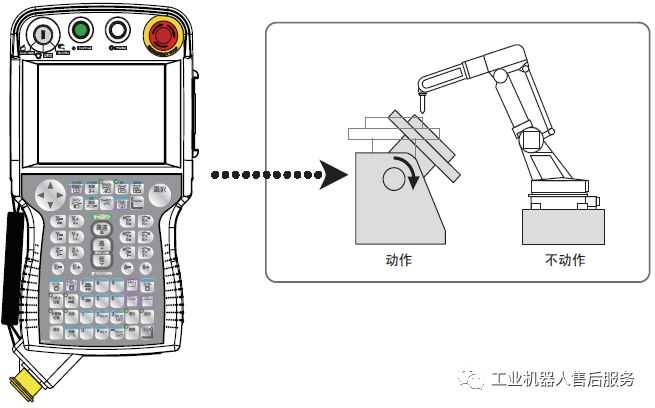
2.4.2单独
如果选择“单独”轴操作,则仅轴操作对象的机器人运行。
在机器人与工装轴相互进行其他作业的程序点使用。
轴操作对象为从侧
轴操作对象为主侧

2.5轴操作对象的选择
在有多个轴组的协调系统中,可通过以下操作切换操作对象。
2.5.1有编辑程序时
显示编辑程序时,显示的程序中登录的轴组为操作对象。
•按下[机器人切换],操作对象即切换为机器人。

•按下[外部轴切换],操作对象即切换为工装轴。

2.5.2无编辑程序时
没有编辑程序时,请按照以下步骤移动机器人。
1.选择想要移动的轴组,按轴操作键进行移动。
–按下[转换]+[机器人切换],进行操作对象机器人的切换。
此时,[机器人切换]的LED闪烁。
–按下[转换]+[外部轴切换],进行操作对象工装轴的切换。
此时,[外部轴切换]的LED闪烁。
2.按[机器人切换]或[外部轴切换]键即可复原。
2.6程序登录
1.从主菜单中选择【程序】
2.选择【新建程序】
–显示新建程序画面。
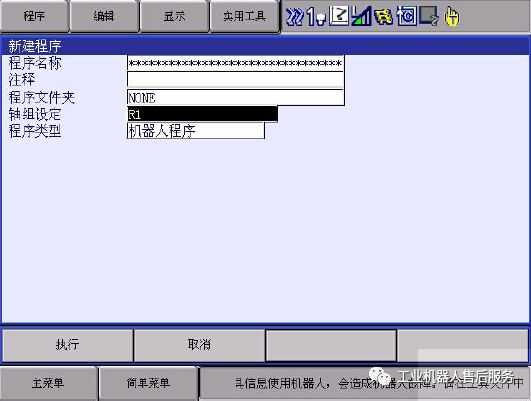
3.输入程序名称
–选择程序名称,通过文字输入操作输入程序名称。
文字输入操作请参阅DX200操作要领书“1.2.6文字输入操作”。
4.按[回车]
5.选择“轴组设定”
6.选择轴组组合
7.按“执行”–程序名称即登录在DX200内存中,并显示程序内容画面。
2.7移动命令的登录(S)MOV□+MOVJ
移动命令通过以下方法登录。
2.7.1主侧(工装轴)的操作
1.在示教模式下显示程序内容画面
2.按[外部轴切换]
–操作对象变为主侧(工装轴)。

3.选择连动或单独
–按[连动/单独]进行选择。
–选择“连动”时显示以下标记。
要使从侧也跟着动作,请选择“连动”。

–选择“单独”时显示以下标记。

4.通过轴操作键移动到期望位置
2.7.2从侧(机器人)的操作
1.按[机器人切换]
–操作对象变为从侧(机器人)。

2.通过轴操作键移动到期望位置
3.选择协调插补或个别插补
–按[协调]进行选择。

4.确定插补方法
–按[插补]进行选择。
5.确认速度
6.按[回车]
–设置被如下登录。