三菱也出EtherCAT伺服控制器了,下面来说说使用欧姆龙来组态一个三菱MR-JET系列伺服具体步骤。
1.组态
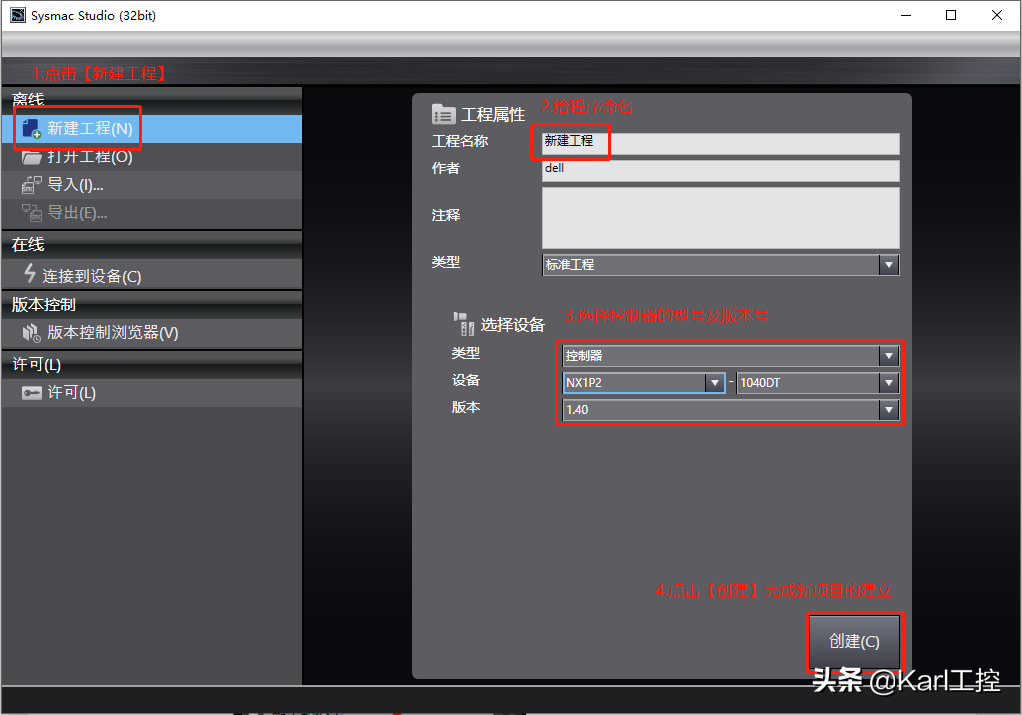
1.1打开SysmacStudio软件,并新建一个项目。
参考步骤如图所示:
1.2组态驱动器
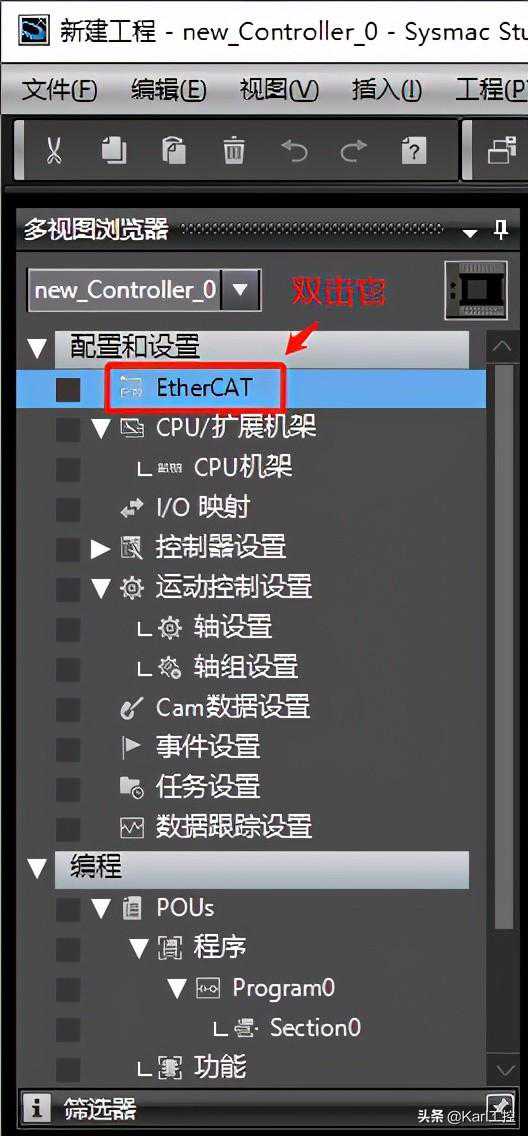
展开【配置和设置】,双击打开【EtherCAT】,如图所示
1.3将驱动器添加到主设备下面
参考步骤如图所示:
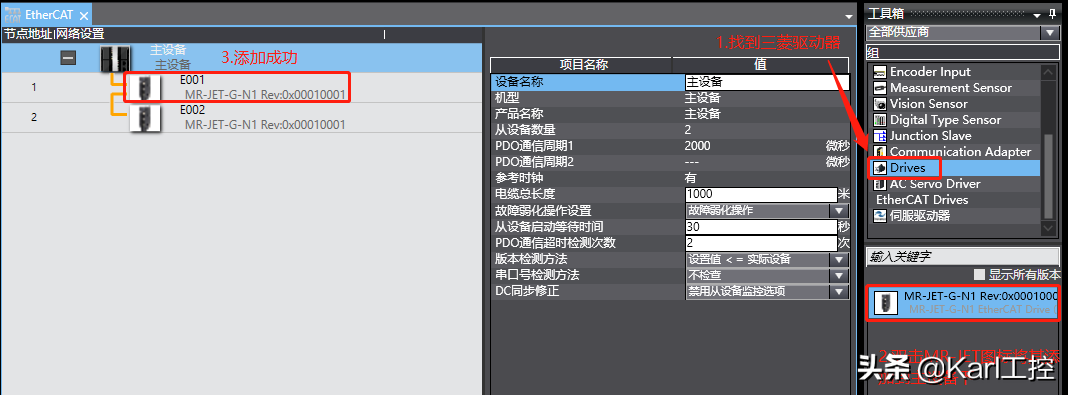
注:如果找不到三菱伺服驱动器,说明你没有安装它的XML文件,需要找供应商将MR-JET的XML文件给你,软件中手动安装即可。
2.PDO配置
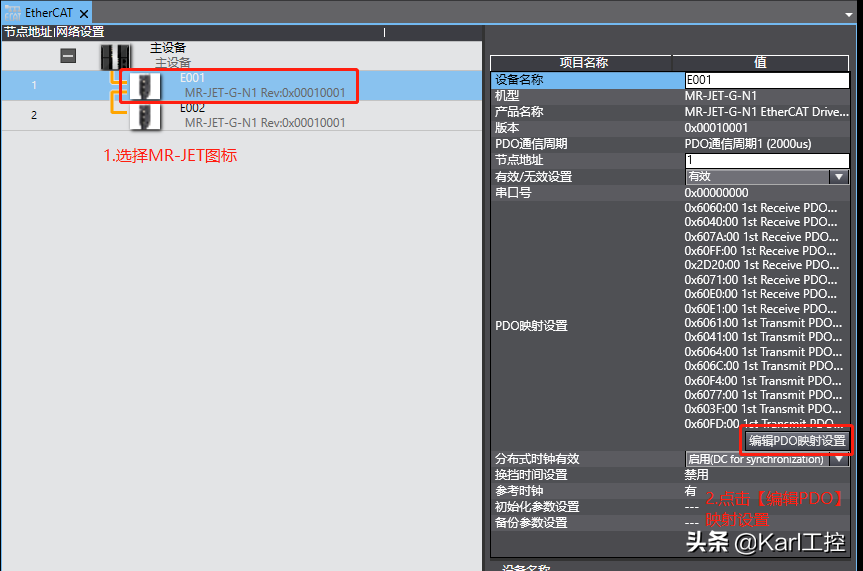
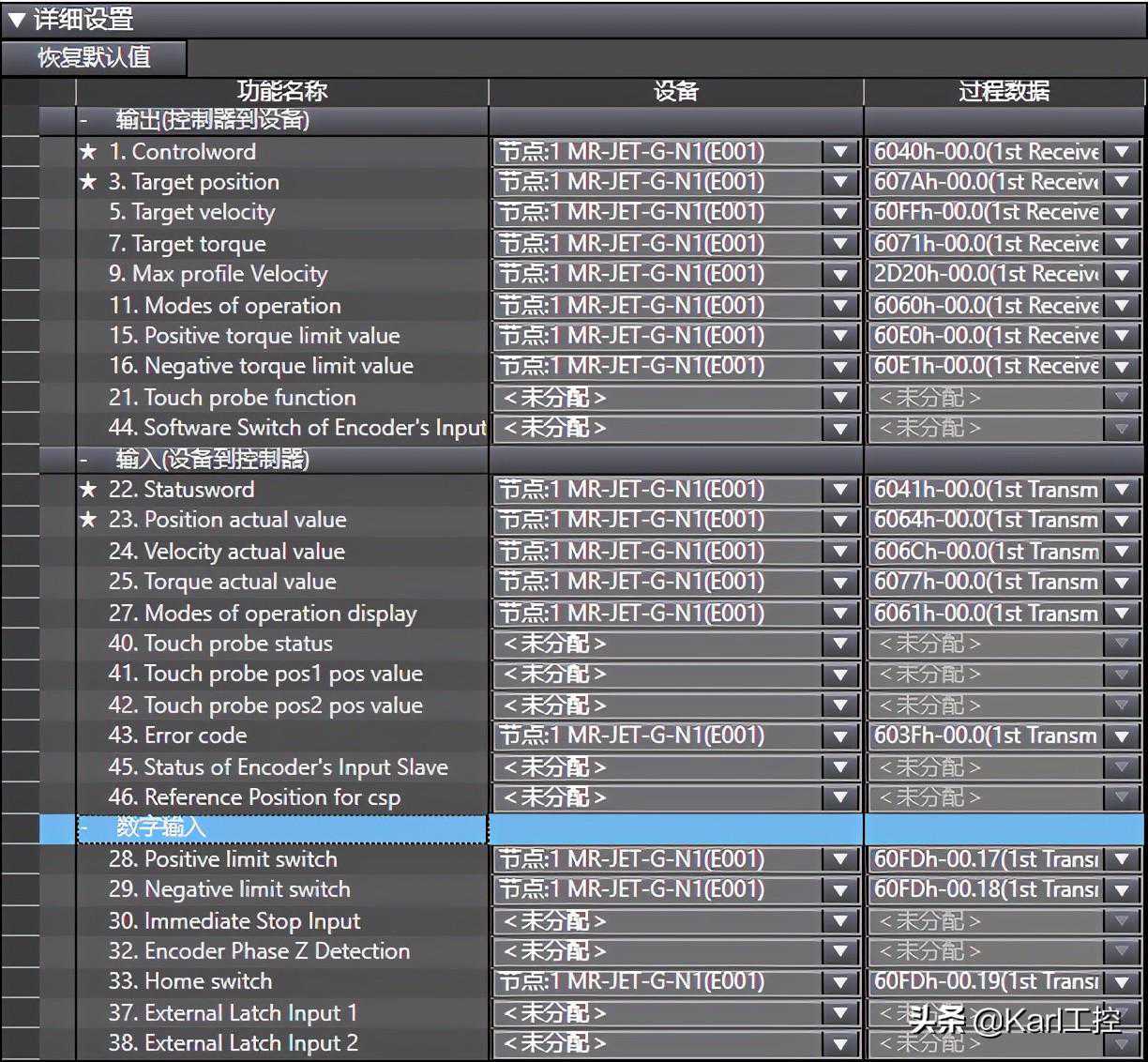
2.1打开【编辑PDO映射设置】
参考步骤如图所示:
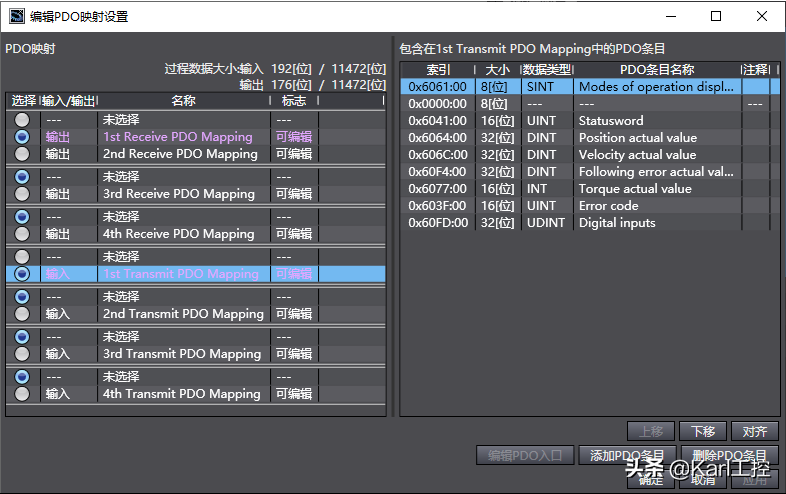
PDO设置如图所示:
输出:
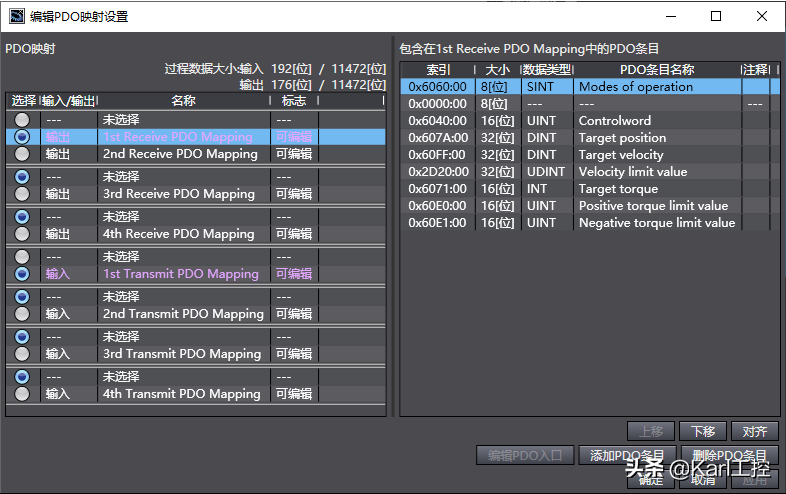
输入:
3.轴设置
3.1添加一个单轴位置控制轴
参考步骤如图所示:
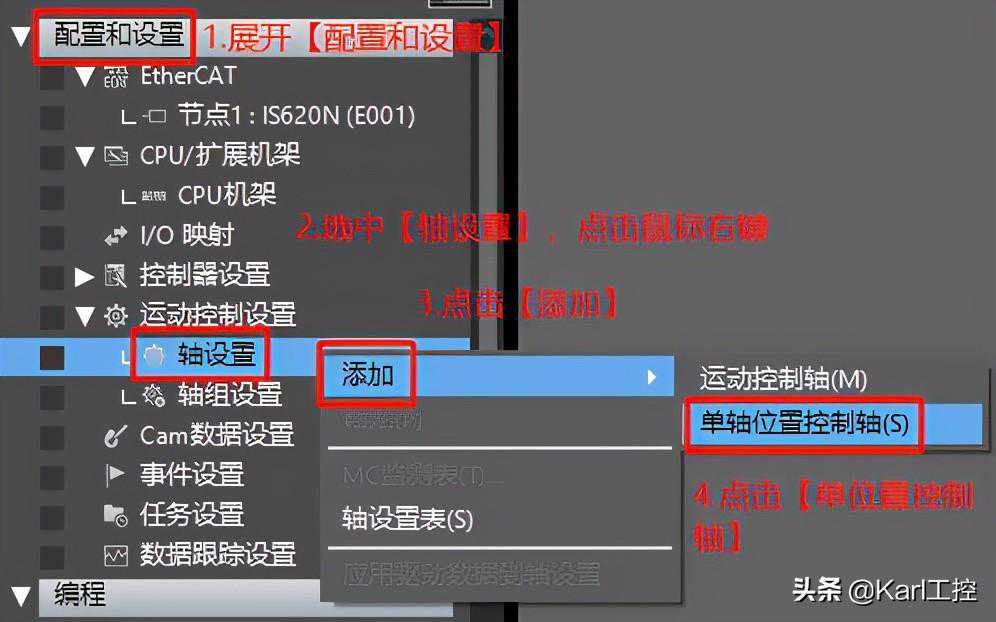
成功添加了一个轴

3.2轴的基本设置
设置如图所示:
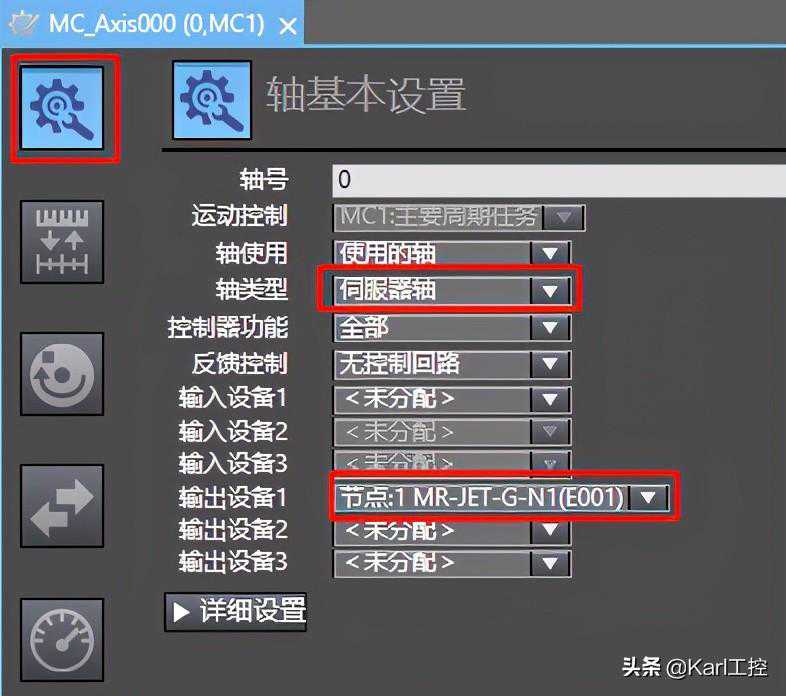
详细设置
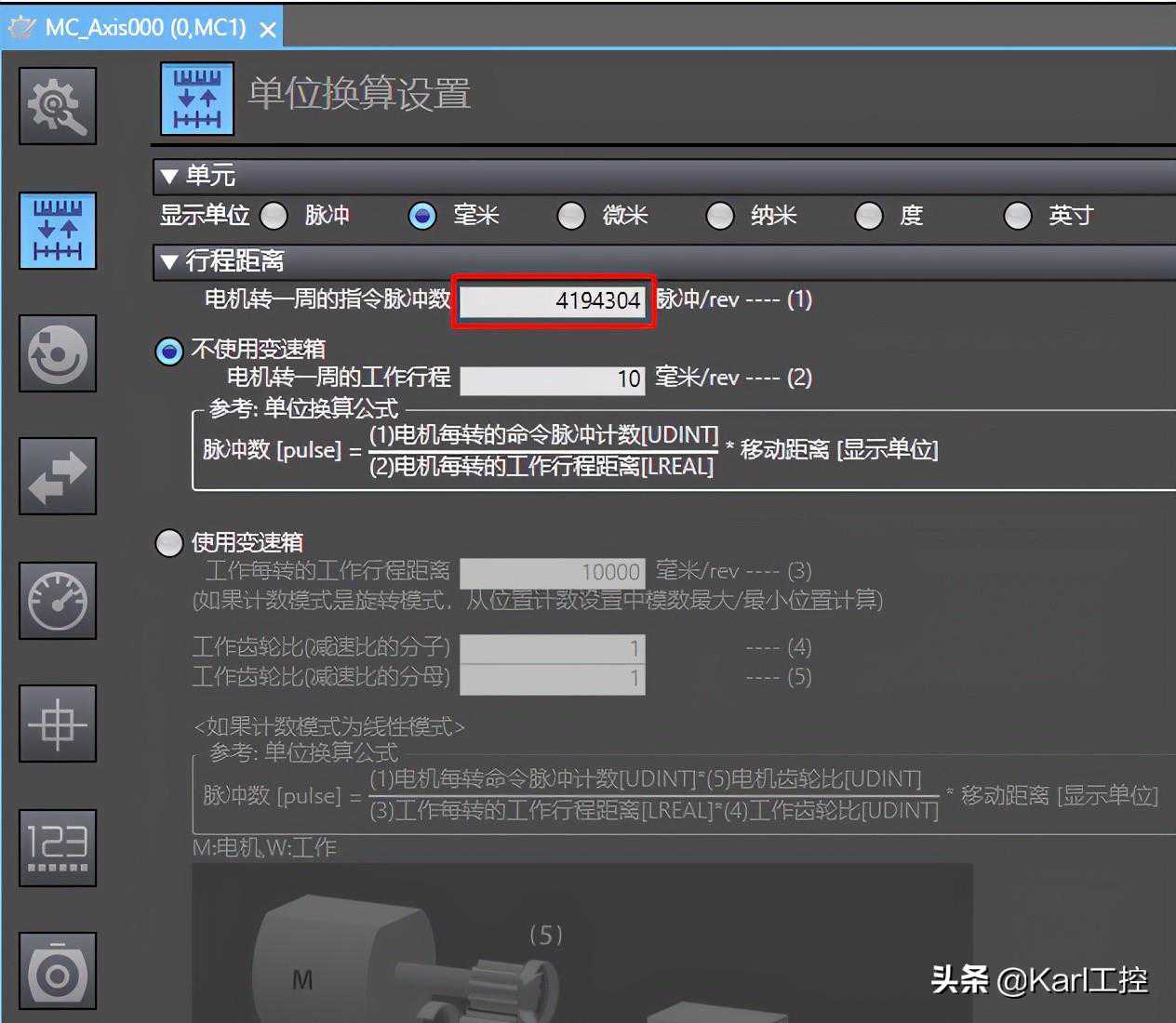
3.3单位换算设置
电机转一周的指令脉冲数:填写伺服电机编码器分辨率。例如22位编码器的分辨率是4194304,这里就填4194304
电机转一周的工作行程:填写伺服转一周物体移动的距离。例如电机带一个丝杆导程为10mm,无减速机,那么这里填10。如果有减速机,速比为1:2,那么这里填5。
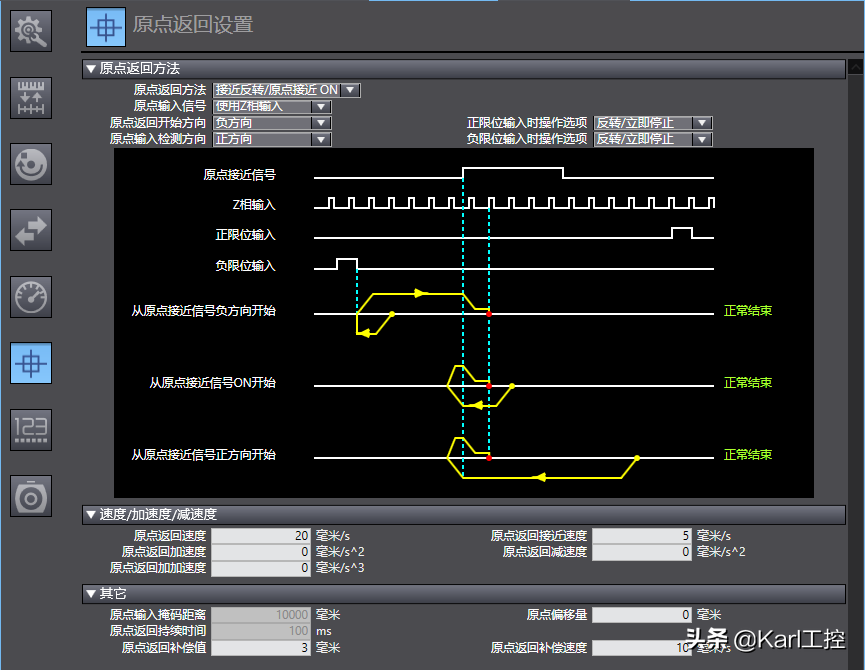
3.4原点返回设置
3.5其它设置
其它设置可以采用默认即可。
以上就是本篇的全部内容感谢大家的观看,谢谢!
创作不易,点个赞再走呗!



