目录
一、定位控制的目的与用途
二、定位的种类和比较
三、定位控制工作流程
四、定位系统涉及概略
五、FX系列定位模块
一、定位控制的目的与用途
二、定位的种类和比较
定位的分类
l1.按系统方式
l2.按控制轴数
l3.按动作控制
l4.按定位程序
l5.按指令接口
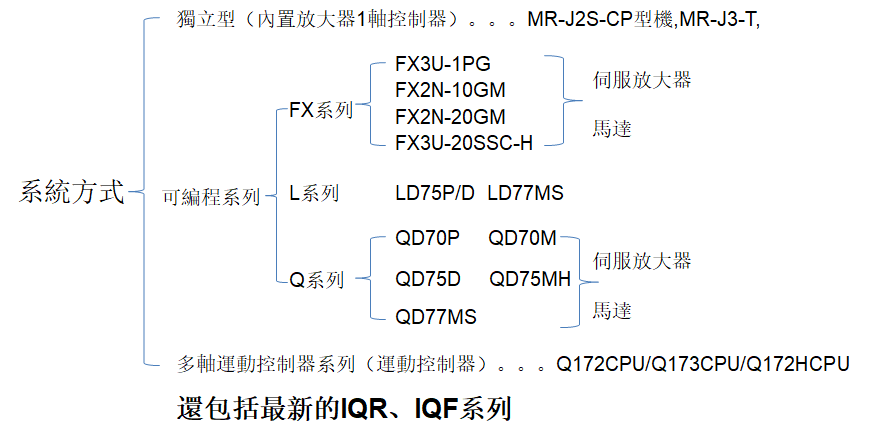
2.1按系统方式
2.2按控制轴数
2.3按动作控制
独立控制:在有2轴以上的控制轴数的定位指令装置上,对各轴进行独立控制的功能。即对各轴的控制部份分别用不同的程序、运行方式(手动、自动、原点复归等)启动,停止都分别进行控制。
同步控制:在有2轴以上的控制轴数的定位指令装置中,可同步控制多个轴的功能。即用一个程序进行多个轴的控制,同步进行运行方式(手动、自动、原点复归等)启动,停止
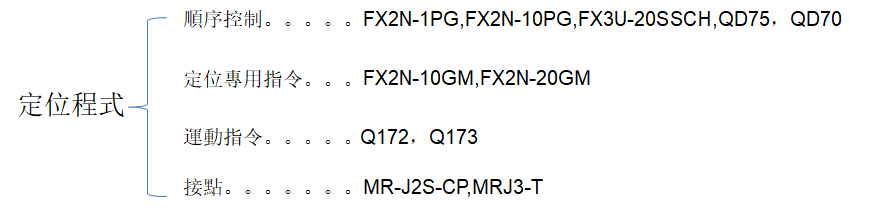
2.4按定位程序
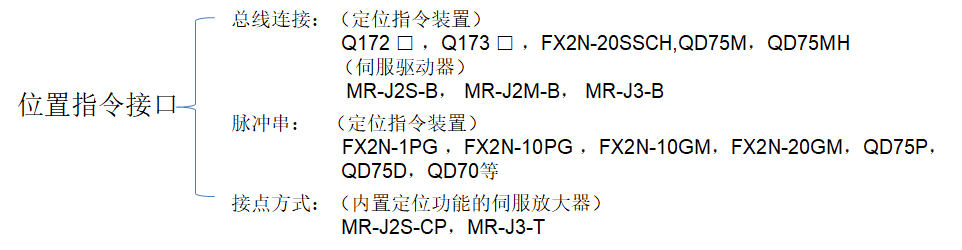
2.4按位置接口
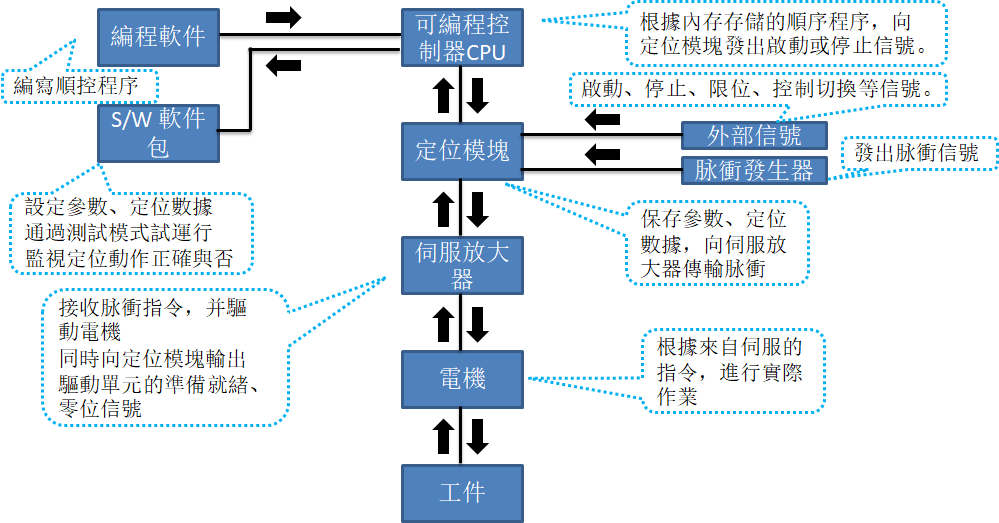
三、定位控制工作流程
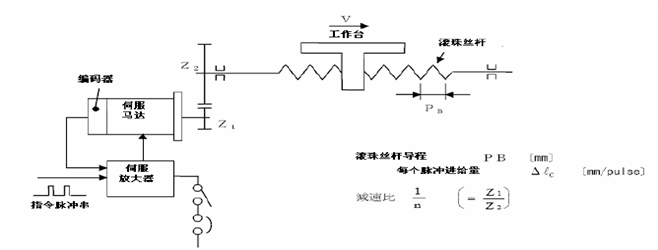
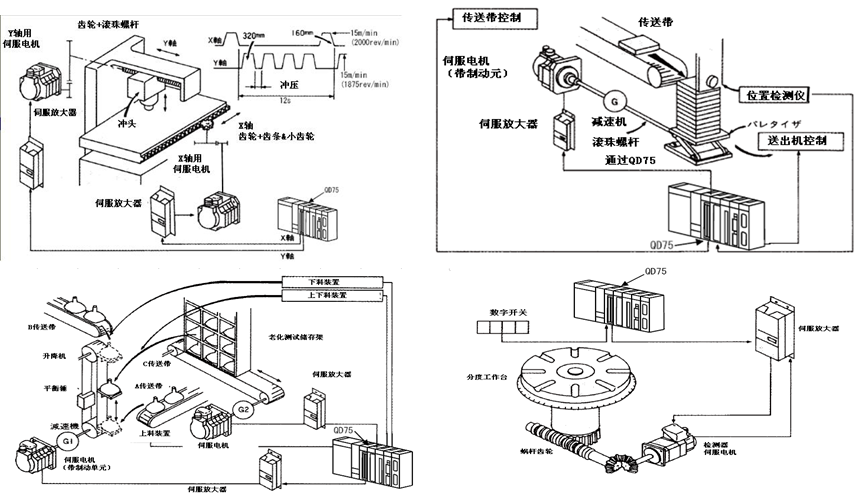
四、定位系统涉及概略
1.每个脉冲的机械进给量
2.机械综合精度和电气精度
3.对应于机械最高速度的马达转速
马达转速=(机械速度/滚珠丝杆导程)*(1/减速比)
问:机械速度要求达到3m/s,滚珠丝杆导程为10mm,减速比1/5,3000r/min的电机是否能适用?
五、FX系列定位模块
1.FX2N-1PG、FX2N-10PG特点:
1.有简易定位控制所需的7种运行模式,根据各工程运行,支持近S形加减速,流畅的进行高速定位运行。
2.FX2N-1PG最大输出100KHz脉冲串;FX2N-10PG最大1MHz的高速脉冲,可进行高速、高精度的定位。
3.FX3U/FX3UC上最多可连接8台。
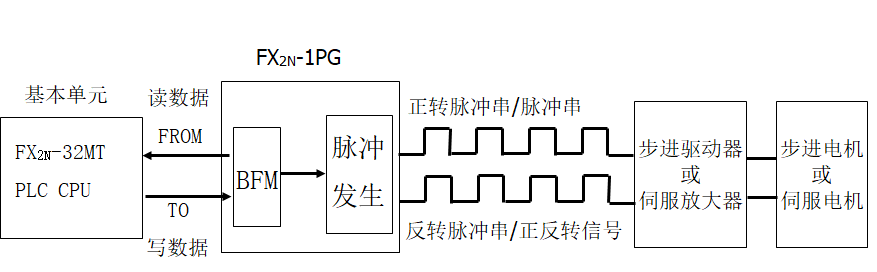
2.FX2N-1PG、FX2N-10PG脉冲发生单元
FX2N-1PG系统结构图如下所示:
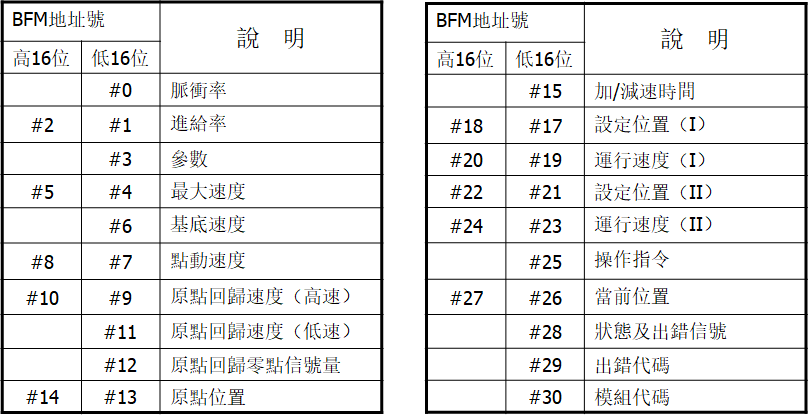
3.FX2N-1PG、FX2N-10PG缓冲存储器如下:
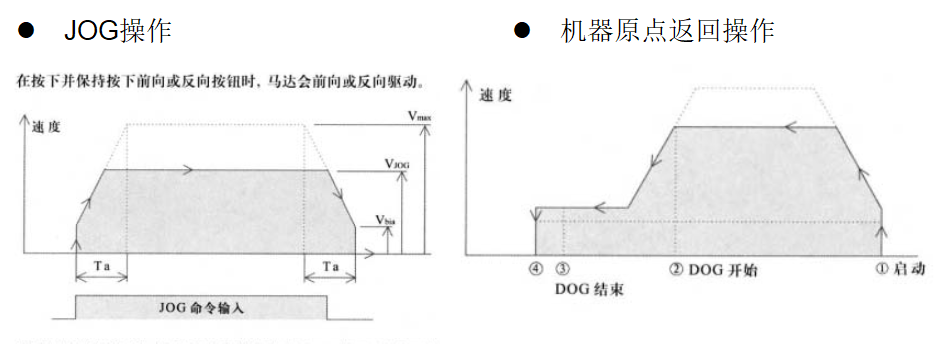
4.FX2N-1PG、FX2N-10PG操作模式如下:
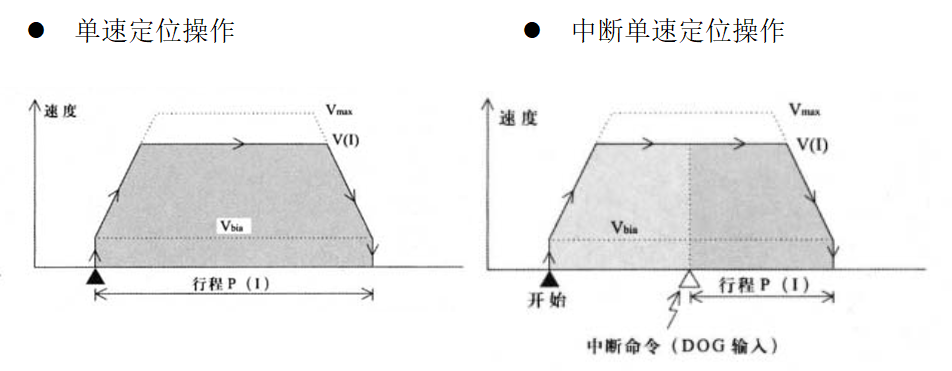
5.FX2N-1PG、FX2N-10PG操作模式如下:
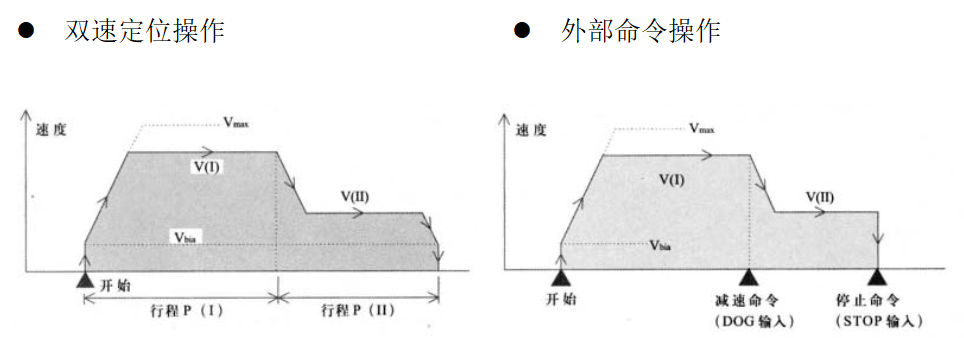
6.FX2N-1PG、FX2N-10PG操作模式如下
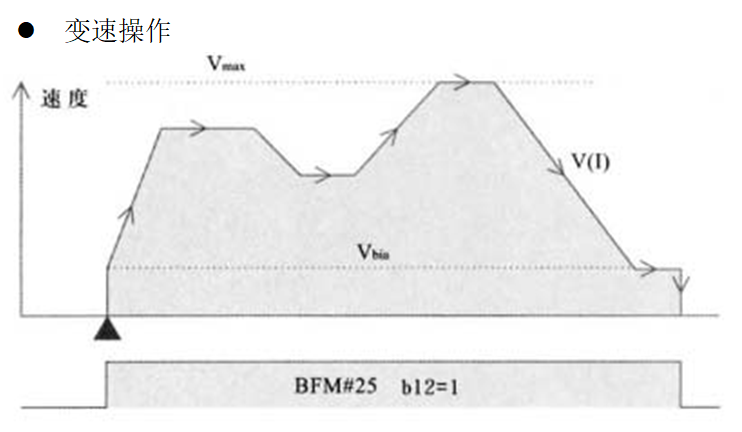
7.FX2N-1PG、FX2N-10PG操作模式如下:

8.FX2N-1PG、FX2N-10PG参数设置如下:
lBFM#3设为H0000:

1.马达系统:b1b0=00;
2.定位数据的倍数:b5b4=00;倍数为1
3.脉冲输出格式:b8=0;
4.旋转方向:b9=0;
5.原点返回方向:b10=0
6.DOG输入极性:b12=0
7.DOG(近原点信号)打开计数:b13=0
8.STOP输入极性:b14=0
9.STOP输入模式:b15=0;如果给出STOP命令,该操作被中断
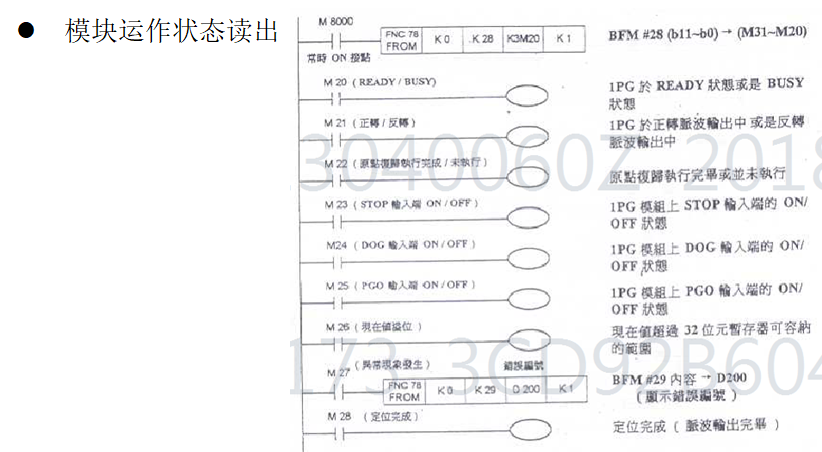
9.FX2N-1PG、FX2N-10PG程序示例如下
10.FX2N-10GM、FX2N-20GM特點:
1.FX2N-10GM可以进行单速定位和中断定位,也支持多段变速运行
2.FX2N-20GM支持线性插补、圆弧插补的同时可进行2轴控制
3.连接FX3U/FX3UC系列PLC最大可连接8台,实现多轴控制
4.或者可以不连接PLC,独立运行(可扩展I/O)
5.最大可输出脉冲200KHz脉冲串(插补时100KHz)
6.具有绝对位置检测功能和手动脉冲器连接功能,专用软件(FX-PCS-VPS/WIN-E)开发流程图式程序
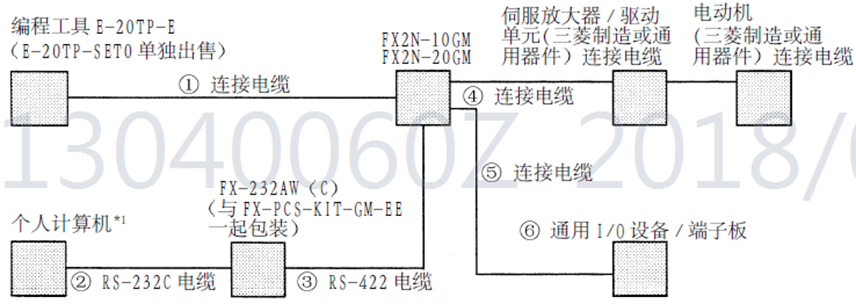
11.FX2N-10GM、FX2N-20GM系统組成如下
1.个人计算器软件:FX-PCS-VPS/WIN-E
12.FX2N-10GM、FX2N-20GM性能規格如下:
项目
FX2N-10GM
FX2N-20GM
控制轴数目
单轴
两轴(两轴或两根独立同步轴)
应用PLC
和PLC母线连接,所占用的I/O点数目为8点,连接FX2NC系列PLC时需加FX2NC-CNV-IF
程序存储器
内置RAM(3.8K步)
内置RAM(7.8K步)
可选存储器板
电池
带有内置FX2NC-32BL型锂电池
约3年长寿命
定位单元
命令单元:mm、deg、inch、pls(相对/绝对)
最大命令值+999999(当间接规定时32位)
零点回归
手动操作或自动操作,DOG信号机械零点回归,通过电气启动点设置可进行自动电气零点回归
控制输入
操作系统:FWD(手动正转),RVS(手动反转),ZRN(机械零点回归),START(自动开始)STOP;
手动脉冲发生器(最大2KHz),单步操作输入
伺服系统:SVRDY(伺服准备),SVEND(伺服结束)
控制输出
一般用途:主体有Y0到Y5
一般用途:主体有Y0到Y7,用扩展可Y10到Y67,最大48点
控制方法
编程方法:程序通过专用编程工具写入。
表方法:当PLC一起使用时,用FROM/TO指令进行定位
编程方法:程序通过专用编程工具写入模块。
参数
9种系统设置,27种定位设置,18种I/O控制设置
12种系统设置,27种定位设置,19种I/O控制设置
软组件
输入:X0到X3,X375到X377
输出:Y0到Y5
辅助继电器:M0到M511
指针:P0到P127
数据寄存器:D0到D1999
变址寄存器:V0到V7
输入:X0到X67,X372到X377
输出:Y0到Y67
辅助继电器:M0到M99,M100到M511(通用和电池备用区)
指针:P0到P255
数据寄存器:D0到D99,D100到D3999
变址寄存器:V0到V7,Z0到Z7
自我诊断
参数错误、程序错误、外部错误可通过显示和错误码来诊断
13.FX2N-10GM、FX2N-20GM定位指令如下
指令
说明
FX2N-10GM
FX2N-20GM
cod00DRV
高速定位
√
√
cod01LIN
线性插补定位
√
√
cod02CW
圆弧插补定位(顺时针)
×
√
cod03CCW
圆弧插补定位(逆时针)
×
√
cod09CHK
伺服结束检查
√
√
cod28DRVZ
返回机械零点位置
√
√
cod31INT
中断停止
√
√
cod73MOVC
移动数量修正
√
√
cod90ABS
指定绝对地址
√
√
cod92SET
设定当前值
√
√
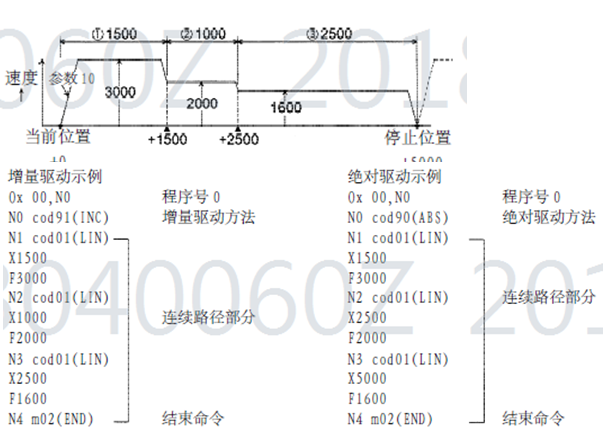
14.FX2N-10GM、FX2N-20GM定位指令示例如下
1.Cod01(LIN)是一个线性插补指令,也可以在10GM中指定连续路径,进行多步操作。
2.在多步操作中,下一个过程的准备工作和当前过程同时执行。因此,当从当前操作速度转变到下一步的速度的可用的距离太小时,或者移动时间太短时,机器不可能连续操作,而会短暂停顿。
3.对多步操作的步数(连续路径数量)没有任何限制,使用m码的操作的执行方式和上页所说明的连续路径的操作相同。
4.在FX2N-20GM中,通过指定一个要操作的轴(X轴或者Y轴)也可以进行多步操作。(在这种情况下,因为需要插补控制,只能进行同步2轴操作。未指定的轴不会移动)



