在prc组态变频器参数配置时,必须选择111豹纹,如果选择的是其他豹纹或者组态的豹纹长度不对,可能会导致控制出现问题。
fb284是基于周期通信过程数据pcd来实现的,底层调用了sfc14和sfc15来实现数据一致性的收发。fb284可以在主程序ob一中调用,也可以在周期中断ob32中调用。
下面看一下fb284这个库程序,它的程序块输入输出都有很多的端子,要使用它,首先必须了解每一个端子每一个参数的含义。
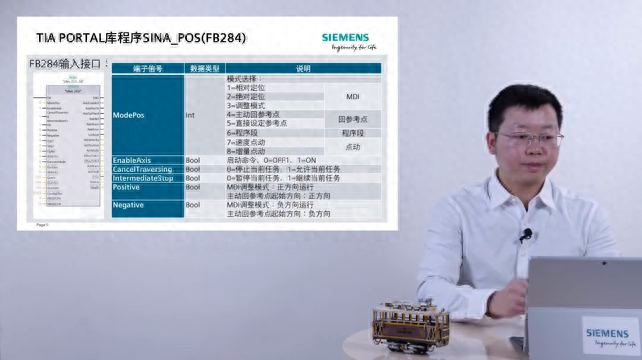
·首先来看一下它输入这一头,第一个非常重要的是模式选择,也就是modeposition这一个段子,它的数据类型是整形数,可以选择的。这些选项包括:一是代表相对定位,二是绝对定位,三是调整模式,四是主动回参考点,五是直接设定参考点,六是程序段,七是速度点动,八是增量点动。

·接下来是enableaccess是使能轴,从字面上来看就是使能轴的命令,当它从零到一的时候就是轴就使能了。
·接下来是cancel、traversing和intermediatestop,也就是stwc的第四位和第五位,一个是取消任务,一个是暂停任务。

·接下来是positive和negative,这是mdi调整模式的方向选择,正方向还是负方向,当然这个回参考点,主动回参考点的起始方向也可以通过这两个端子来选择。
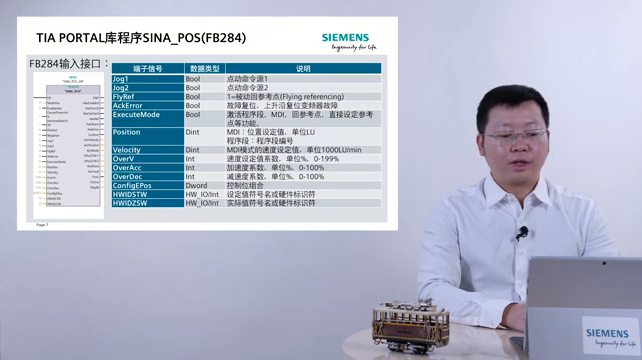
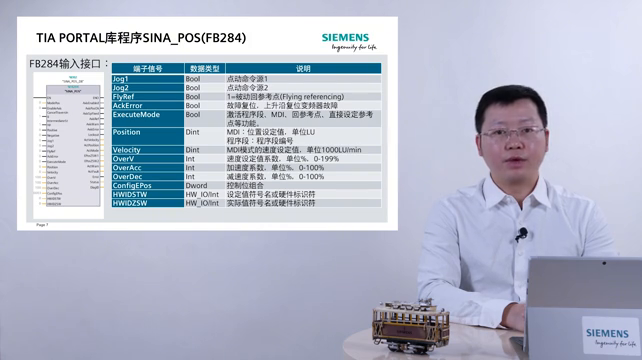
·接下来是叫个一和叫个二,这是选择点动的命令源一和命令源二。
·然后是flyreference,这个是被动回参考点。刚才如果大家细心一点可能会注意到模式选择里边是没有被动回参考点的,被动回参考点只需要把flyreference设置成一,在轴运行的过程当中就可以去做被动回参考点了。

·接下来有一个acknowledgearrow就是复位故障的,有一个非常重要的信号叫executemode就是执行模式,它用于激活程序段,激活mdi回参考点,直接设定参考点等功能。在使能轴之后要想激活当前的运行模式就必须要将executemode有一个零到至一的过程。

·接下来position是mdi的位置设定值,velocity是速度设定值,overv和overac,overdc是前边反复提到的速度加速度减速度的系数。
·还有一个信号configepose,这个是双字的控制位的组合,后边可以看一下它包含了哪些相应的具体的信号。
·然后是哈德威尔的id,包括收发可以设置两个不同的id,这个地方可以在左边的项目数下方prc的默认变量表里边找到它的111豹纹对应的。硬件标识符把它拖拽过来就可以了。
这个表是刚才提到的configepose的里边具体对应的哪些位,这里边是把fb二八四功能块的端子上没有列出出来的一些功能封装在configepose里边了。如果需要端子上没有列出来的额外的功能,可以通过自己去选择configepose的相应位,给它置一或者置零来实现相应的功能。
接下来看一下fb二八四的输出接口,输出接口主要是显示一些状态或者故障报警等等信号的。像axisenable的就是轴已使能,axisposeok就是轴已经到达目标位置,axissetpointfixed是设定值固定,axisreference是参考点已设置。
还有一些功能。



